宇宙空間で「自撮り」をする、リーマンサット・プロジェクトの超小型人工衛星『RSP-01』。
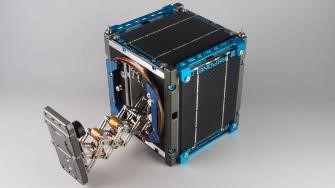
かっこいい人工衛星が自撮り棒となるアームを伸ばして地球を背景に「自撮り」をする、というミッションを達成するために各開発担当がこだわってきたこと、みえてきたものはなんだったのか。開発リーダーたちへのインタビューの第6弾。
熱・構造系、C&DH系、電源系、プロジェクトマネージャー、サブ・ミッション系の開発リーダーたちに続き、今回は、ミッション系のソフトウェア開発リーダの田中寛之さんとハードウェア開発リーダーのゆういちさんに「自撮り」するミッションに対するこだわりや想いについて、お話をうかがいました。
<Interview & Text: 鬼頭佐保子 技術広報課&RSP-01>

RSP-01ミッション系
ソフトウェア開発リーダー
田中 寛之さん(左)
ハードウェア開発リーダー
ゆういちさん(右)
ーーまず最初に、田中さんにおききしたいと思います。開発リーダーをされているミッション系とはどういうことをしているのですか?
田中 「宇宙空間で『自撮り』をするミッション」を遂行する部分のハードウェア(アーム)と、ハードウェアを動かすソフトウェアを作り上げることが、我々ミッション系の仕事、いや趣味です。(笑)
開発内容を大まかに言うと、主に4つあります。一つ目は、打ち上げの振動や宇宙空間での作動に耐えるアームの構造、二つ目は、アームの展開制御を行うArduinoというコンピューターのソフトウェアの開発で、これはC&DH(コマンド&データハンドリング)系と一緒に開発することになります。三つ目は、カメラで撮影を行うRaspberry Piというコンピューターのソフトウェア開発、四つ目は、C&DH系との通信とサブ・ミッション系へのコマンド(コンピュータに特定の機能の実行を指示する命令)を中継する部分をつくっています。
ーーアームの制御やカメラの制御、RSP-01に搭載された2つのコンピューターであるArduinoとRaspberry Piの連携がうまくいくようなプログラムを考え、作成しているということですよね? それぞれの開発で大事なポイントはどういうところなんでしょうか?
田中 アームを制御するソフトウェア開発では、アームの展開や収納における安全な制御が大事です。アームを動かすときは、センサーでアームの展開位置を監視しながら制御します。センサーが故障していた場合やセンサーの値から異常を検知した場合は展開を中止するようなプログラムになっています。また、過電流からの保護なども組み込んでいます。
カメラについては、Raspberry Piに接続した互換カメラを使っているのですが、Raspberry PiにはLinuxが載っているということで、すでにある過去の資産を利用させてもらいます。
ーーLinuxというのは、ハードウェアを動かすためのオペレーションシステムですよね。私はOSときくと、パソコンのWindowsやMacOSしか見たことがないので、Raspberry PiにLinuxが載っているので過去の資産を利用できるというのがピンとこないのですが・・・
田中 Linuxのシステムは、システムそのものが一般公開されているので、今までいろいろな人が開発して公開されています。そのため、「raspistill」などRSP-01のソフトウェア開発でも使える色々なコマンド(コンピュータに特定の機能の実行を指示する命令)がすでにあるため、それらのコマンドを繋ぎ合わせて実行するだけで、カメラでの撮影が実行できてしまいます。ただ、Raspberry Piは時間にシビアな制御は得意ではないため、地球が背景に写るようなタイミングを狙って撮影することは困難です。そのため連続撮影を行います。狙って撮るのは難しいですが、連続撮影を行えば高確率でいい写真も撮れるでしょう。そして、サブ・ミッション系が開発している「機械学習による画像選択」のプログラムが、その中からいい写真を判定してくれるはずです。
ーーやはり基幹となるシステム開発になるので、コマンドに関係する各系との連携も大事なんですね。
田中 そうですね。自撮りの制御においてはArduinoとRaspberry Piを連携して動作させる必要があります。写真の撮影をするには、Arduinoが動力源となるモーターとセンサーを使ってアームの展開を制御し、アームの展開が完了した後にRaspberry Piが撮影を行うようにさせます。そのためには、ArduinoとRaspberry Piの間で通信を行いながら撮影の一連動作を実行します。
ーー特に「自撮り」のための開発で大変だったエピソードはありましたか?
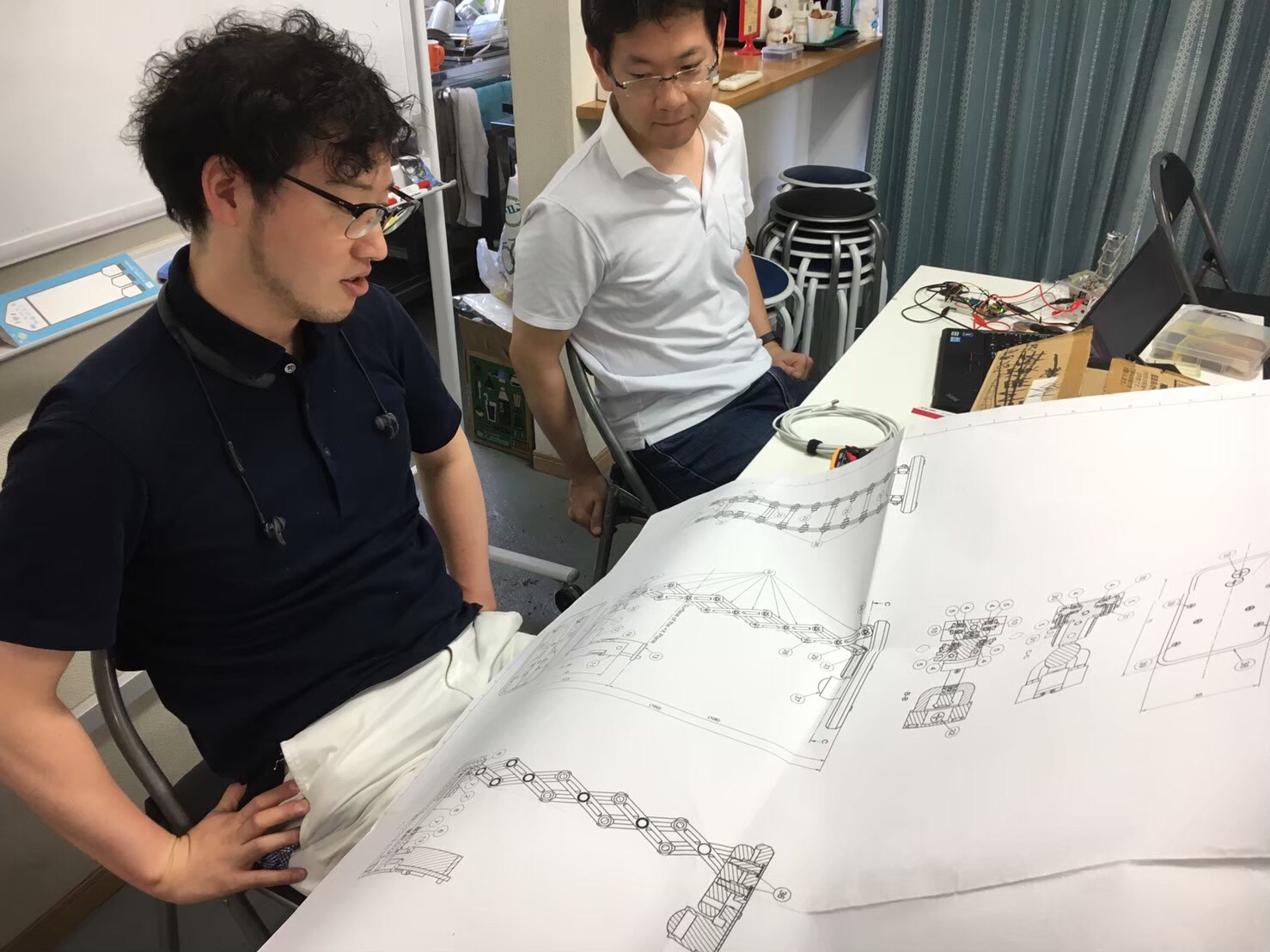
田中 この超小型の筐体の中にアームをどうやって収めるのか、というのが苦労した部分です。T系とかC系など他の系が開発するモジュール(機器やシステムの一部を構成するひとまとまりの機能を持った部品)に必要なスペースも考えると、アームに使えるスペースは、当初の想定よりも小さなものでした。カメラを魚眼にしてアームの長さを切り詰め、動力源となる小型モーターを求め、真夏の秋葉原を歩き回り、駆動機構のパッケージングに工夫を凝らし、そして最終的には特注部品も使用することで、なんとかコンパクトに仕上げました。
ーー田中さん、そんな苦労はみじんにも出されなかったので全く知りませんでした・・・。どの開発リーダーも「アーム」のためのスペース確保のために各系の開発でも苦労したとはいっていましたが、1Uという10センチメートル角の超小型人工衛星で、面白いミッションを実現しようとする時の技術的な難しさというか基本的な課題になるのだなとすごく思いました。
田中 それと、無重力下でアームがどのように動くか想定するのが難しいというのもありますが、アームを安全に制御する方法についても悩みました。アームを駆動するモーターを動かしすぎるとアームが壊れる可能性があるため、安全機構・制御が必要になるためです。実際、開発の過程でアームの展開が止まらずに動き続けてロックしてしまったこともありました。一点物のアームを復旧するためにメンバーが緊急招集されて、みんなで解決に取り組んだのは、いい思い出です。
ゆういち アームの展開がスムーズにできた!との大喜びの瞬間が動画にもありますが、最後にRSP-01のプロジェクトマネージャーの三井さんが、「写真どうぞ、あちらの方へ」とめちゃめちゃ上機嫌におっしゃられた、この時まさに問題が発生して、以後ピクリとも動かなくなっちゃったんですよね。(笑)
ーーあはは。懐かしいです。覚えています、この時。この後あれ?と青ざめて。
ゆういち 今でこそ笑えますよね(笑)。それで、いろいろ皆で議論した結果、「モーターに電流流しすぎて、モーターが壊れてしまった」との結論に一旦なりました。実際にテスターでモーターの端子を当たると、導通が確認できなかったので。そのため、私はモーターを交換するために、モーターのケーブルを一旦切断しようと、カッターでケーブルの被覆まで刃を入れました。けれど、ふと「そんな簡単にモーターって壊れるのか?」と頭をよぎって、ケーブル切断 を直前で辞めたんですよね。
を直前で辞めたんですよね。
ーーえ? 何か感じたんですね。
ゆういち はい。その時の心境を例えると、映画のワンシーンにあるような爆弾解体で赤色のケーブルを切るのか、青色のケーブルを切るのか迷っているような感じです。それで、もう一度テスターでモーターの端子を当てたら導通を確認出来ました。どうやら、端子の表面が錆びてたらしく、危うく騙されるところでした!
ーーえええ? それは本当に危機一髪ですよね。そしてその直観力に救われたわけです!私はこの時、アームが引っかかってしまって動かなくなったと思っていたんですが、別に物理的に何かひっかかっていたわけではないんですね。そして、田中さんがおっしゃっていたように、復旧するためにミッション系メンバーが緊急招集されて、見事トラブルシューティングされたわけですが、結局、何が原因だったのですか?
田中 アームはモーターでネジを回して動かしているのですが、そのネジが端までいくと固く締まってしまいます。そうなると、モーターの力では動かなくなり、アームが展開できなくなっていたんです。結局、六角レンチを使ってイモネジに差し込めば、固く締まってしまったネジを回せそうだということで、手でネジを緩めました。
ーーRSP-01のアームはネジだらけのマジックハンドというイメージですが、ネジを回し続け過ぎると端までいってしまうと開かなくなる恐れもあると。撮影するたびにアームを伸ばしたり縮めたりしているとそのリスクも高くなると思うのですが。
田中 その通りです。そのため、アームの展開や収納については、いろいろなパターンで実施して、安全に実行されるか、または想定通りに異常を検知して止まるかを確認しました。
ーーRSP-01の自撮りアームは、撮影のたびに伸縮するのですか。それとも宇宙にいったらアームは出しっぱなしで撮影するのですか?
田中 アームは撮影するときだけに展開して、撮影が終わったら収納します。アームを出しっぱなしにすると、超小型人工衛星内部が放射線にさらされてしまうからです。
ーー宇宙で動かすものを地上で試験しなければならないところは人工衛星開発で難しいところですが、どのような試験をしたのでしょうか?
田中他にも、こうしたリスクを避けるために、アームが真空中で意図どおり安全に動かせることを確認するため、真空チャンバーで3000回の展開試験をしました。この試験を行うためのテスト用のプログラムを作成し、WEBカメラとRaspberry Piで録画環境を構築して動かし続けました。
さらに、アーム展開を実行するArduinoと撮影を実行するRaspberry Piの間で通信を行うため、この結合部分の試験をしっかりと行いました。開発初期は、通信の失敗が回路によるものなのか、ソフトによるものなのかの切り分けに苦労することもあり、オシロスコープを使って信号(波形)を見ながらの試験もしました。
ーーそして、みなさんで問題の原因を解き明かしてからは、解決は早かったですよね。
ゆういち はい。こちらも開発動画が残っていまして、動画の最後に「(ケーブル)交換しなくて良かった、(切るのを)踏みとどまって良かった」と喋ってるのが私ですね。(笑)
ーーミッション系では、メンバーはどんなふうに一緒に作業をしていたのですか?
田中 伊藤さんが基本的に全体が滞らないように面倒を見てくれて、各自は基本的に一人での作業でした。それぞれ自分の担当部分を黙々とこなして仕上げてくるという感じなので、一緒に作業するということは少なかったです。宇山さんが来てから一定期間はミッション系を知ってもらうことも兼ねてRaspberry Pi側のテストをしてもらいつつ、自分はArduino側のバグを潰すというような分業になりました。
系をまたいだ試験のときに一緒に色んな人と作業することが多かったです。
C&DH系やサブ・ミッション系は通信が発生するので、古川さんとはよく一緒にバグの切り分け・解決をしていました。あとは回路周りが疑わしいときは森下さんも参加して解析したりですね。バグを解決するときはみんな、自分が何系というのは関係なく取り組んだので、ハードウェア、電子回路、組込みソフトウェア、アプリケーションと多岐にわたる領域でモノを作るということができて楽しかったです。
ーー趣味は宇宙開発ということで、おふたりは普段どういうお仕事をされていて、それがどうRSP-01「ミッション系」開発としての活動につながったのでしょうか?
田中 普段は自動車メーカーでソフトウェアエンジニアとしてAndroid開発(プラットフォーム側)に携わっています。その前は電機メーカーで陸上自衛隊向けのソフトウェアを開発したり、システム構築のプロマネをしたりしていました。ソフトウェア開発という部分ではずっと学んできたことが役に立ち、初めて触る言語やフレームワークでも調べながら進められるというところはありました。
しかし、RSP-01のミッション系開発では機械や電子回路、無線の知識(資格)などが必要になる部分もあり、仕事からのつながりがない部分のほうが多かったです。むしろRSP-01の開発に関わることで、今までの仕事では触れることがなかった幅広い技術領域にまたがって作業する機会が得られたことで、ソフトウェアエンジニアとしてステップアップできたという思いが強いです。どんなものでも扱えるような基礎を学ばせてくれた大学の存在も大きいかもしれません。
ゆういち 普段は精密機器メーカで要素技術開発をしています。これは次世代製品のキーとなる新技術を開発することで、厳密に正しくはないですが、研究みたいなイメージです。実業務としては機構設計を良くしているので、そのスキルをそのまま活かして今回の自撮り機構の開発にあたりました。
ーーおふたりの場合は、大学の基礎技術能力や専門スキルが趣味にも活かせたという感じなのですね。最後に、次に向けての思いや楽しみにしていることを聞かせてください。
田中 自撮り写真が地上に降りてくることが一番楽しみです! ミッションが成功した暁には、絶対PCとスマートフォンの壁紙にします。あとは運用で色々と設定を試しながら写真を取りたいですね。
宇宙でどんなふうに写るのか。それと衛星との通信のエラーレートも見たいです。運用は実際に宇宙環境で衛星の機能がどう動くか、そしてどんな新しい課題があるのかが明らかになるのでそれも楽しみです。
ゆういち 私も田中さんと同じく自撮り写真が地上に降りてくるのが楽しみですが、その写真を関係者や支援してくださった人たちへ届けられた時にどんな反応が帰ってくるのかも、とてもワクワクしています。
というのも、私は本業において自分が考えたもの・作ったものを世の中に出したことが未だないんです、恥ずかしい話ですが。研究みたいな仕事なので、チャレンジングで楽しませてもらっている反面、実現にはすごく時間がかかっておりまして。なので、今回の自撮り衛星が、私のエンジニア人生で初めて世の中に出したものになります。
料理と一緒で、作る過程も楽しいのですがやっぱり作ったものを見た人が喜んでくれる姿をみてみたく、それを楽しみにしています。
そのまた未来へ、RSP-01プロジェクト、まだまだ新たなチャレンジを続けています!
ただいま運用メンバーも募集しています。参加についてはこちらから。
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】鬼頭 佐保子
広報部 技術広報課長、技術部RSP-01プロジェクトC&DH系、rsp.横浜支部長。
趣味は宇宙開発、宇宙教育、星空案内、美味礼賛。7つの海を渡るのが夢。