”地球周回軌道を飛び出そう”
ローバー開発チームは”趣味でローバーを作って地球周回軌道を飛び出そう”というコンセプトで活動しています。
今、世の中に存在しているローバーは何百億円というお金をかけて作られた超高級品。研究機関や大学が主導してつくるもので、到底素人に手の出せるものではありません。
しかし、人類初めて?趣味で地球周回軌道まで手作り人工衛星を打ち上げたリーマンサットなら、できることはきっとあるはず、と私たちは考えています。
そうは言っても月行きのロケットはそう簡単に買えるものではありませんし、月の環境に対応したモノづくりを素人の私たちがすぐに習得するのは難しいです。
そのためにまずは、地上で走行できるローバーを開発しています。そして、地上100m~10km程度の高さまで打ちあがるロケットへと搭載し、ローバーが正常に走行できるか?センサなどの情報を取得でき、地上局との通信ができるか?という基本的な技術をみんなで勉強しながら習得しています。
今のところ宇宙へと打ち上げることのできる機会はまだ得られていませんが、いつかは必ず「趣味で月面到達」の目標を達成するべく、日々楽しくDIYでローバーづくりをしています。
リーマンサットの探査ローバーって?
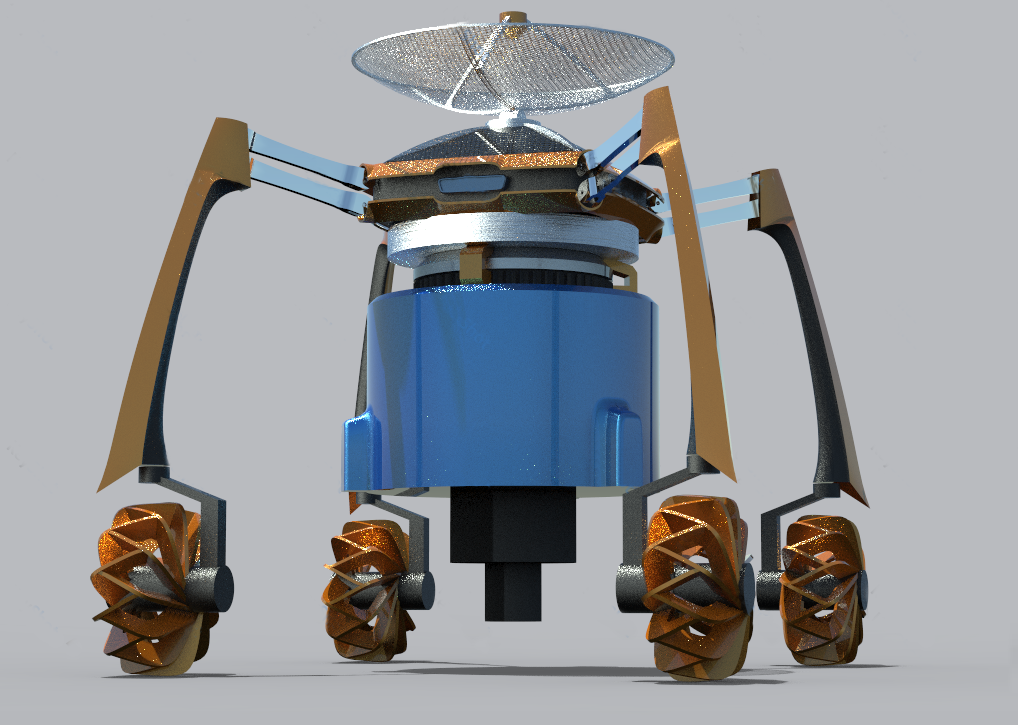
ゆくゆくは月面に到達し、地面を掘ったり何かを植え付けたりするような「田植え機能」が搭載されたローバーの開発を目指しています。
そのための前段階として、
・ローバーが自分で位置を推定し地上からの指示なしに自分で考えて走行できる「自律機能」
・地面と接触し掘ったり削ったりする「掘削機能」
・それらを支える電源や通信など基本的な「バス機能」
などの開発を進めています。
また、単純に月面で田植えをするといっても、実際に稲を植えてもお米は育ちませんが、地面を掘ることや何かを植え付けるような動作は、他の天体の地中の化学組成を明らかにしたり、発信機などを埋め込むことによるマッピングなど、科学・工学的にも面白いテーマでもあります。
そのようなユニークなテーマでモノづくりができるのもリーマンサットならではと思っています。
コードネーム”ZIPANGU”に込められた想い
![]()
現在開発中の”田植えローバー”にはコードネームが与えられています。その名も”ZIPANGU”
ZIPANGUにはロゴマークが作られており、周回軌道をイメージした円形の稲穂から飛び出すようにコードネームが入っています。
これは軌道上を回る衛星開発の更に先を目指し、月にたどり着いてウサギのためにもち米の稲作をしてやろう、というリーマンサットのローバーチームのVISIONが込められています。
これまでの主な活動
スペースプローブコンテストへの出場
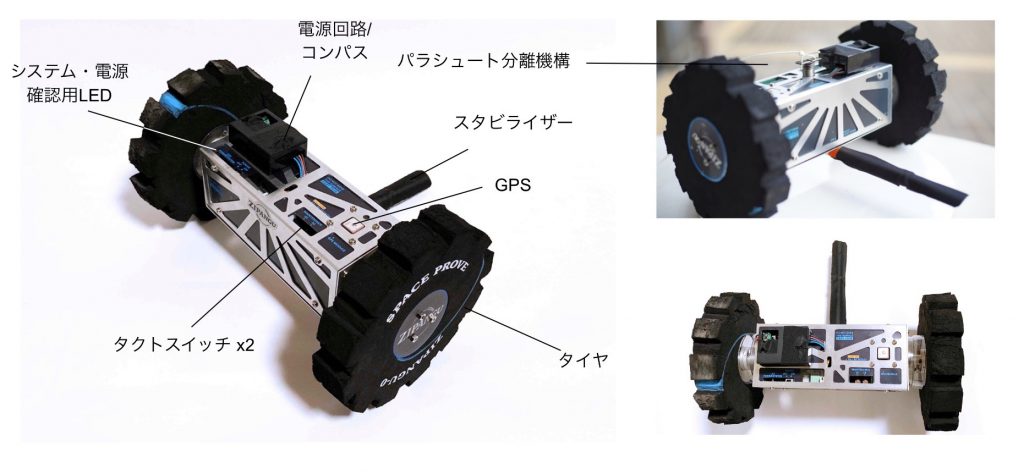
2019年、北海道で開かれた植松電機さん主催のスペースプローブコンテストに出場しました。
基本的な電源や通信やモータを回して走行するという機能の習得を目指し、GPSやコンパスを用いて自己位置を推定、目的地に自律的に進むということを目指して開発しました。

2023年、再度spaceプローブコンテスト2023大会結果詳細 | Space Probe Contesに出場し、最優秀賞をいただくことができました。
プロジェクト体制
ローバー開発も人工衛星と同様に、下記の通り機能ごとのチームに分かれて開発しています。
一つの要素/機能を深く追求してもよいですし、あらゆるチームを見て幅広く活動するのも歓迎です。
プロジェクトマネジメントチーム
全体のマネジメントを行っています。予算の管理や大会などへの提出書類作成、ロケット側との調整ごとが多いです。
内部向けにはスケジュールの管理を行い、メンバーがそれぞれ担当している事柄を調整し、期日を決めたり進捗の確認などを行います。
内部機器チーム
ローバーの頭脳となる部分です。速度や温度などのローバーの状態や、カメラで撮った画像など周囲の情報を集めます。また、集めた情報をrsp衛星を通じて地上局に送ったり、周辺環境を認識して自律走行するのも内部機器のミッションです。
現在は、試作1号機の基板設計や、基本的な動作のプログラム開発、自律移動に関する研究を行っています。
構造体チーム
3DCADのSolid Worksを使用してモデルを作成し、実物を加工して製作しています。
また、月面を軽快に走れるような車輪と、安定した走行ができるようなサスペンションの開発を行なっています。
ミッション系チーム
田植え機構や掘削機構を考えるチームです。現在は土を掘る機構を開発しています。
その他
ローバーチーム専属広報として活動状況やメンバーのインタビューをWEBやSNSで発信したり、本体のデザインなど、少しの興味があればできることを楽しみながらやっています。
活動拠点
各地のコワーキングスペースを利用し、開発をしております。
途中参加でも「やってみたい」という声に応える場を作るべく努力していますので、ご興味・ご関心をお持ちの方はお気軽にご連絡ください。我々の活動や技術についてもっと詳しく聞いてみたい方は、ぜひご参加ください。