宇宙空間で「自撮り」をする、リーマンサット・プロジェクトの超小型人工衛星『RSP-01』。
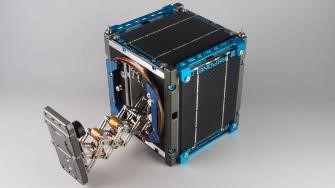
かっこいい人工衛星が自撮り棒となるアームを伸ばして地球を背景に「自撮り」をする、というミッションを達成するために各開発担当がこだわってきたこと、みえてきたものはなんだったのか。開発リーダーたちへのインタビューの第7弾。
熱・構造系、C&DH系、電源系、プロジェクトマネージャー、サブ・ミッション系、ミッション系の開発リーダーたちに続き、今回は、姿勢制御系の開発リーダの米谷拓朗さんに「自撮り」する人工衛星の姿勢制御に対するこだわりや想いについて、お話をうかがいました。
<Interview & Text: 鬼頭佐保子 技術広報課&RSP-01>
 RSP-01姿勢制御系【米谷 拓朗さん】
RSP-01姿勢制御系【米谷 拓朗さん】
ーーまず最初に、姿勢制御系というのは文字通り「人工衛星の姿勢を制御する」開発を行っているチームですが、具体的にはどのような開発をしているのですか?
米谷 姿勢制御系は主に2つのことをしています。1つは、コイルとヒステリシスダンパによる沿磁力線制御の開発。これは宇宙空間で自撮りをする人工衛星の自撮り成功率を上げるために大切なことです。もう1つは、実験的な姿勢制御方法としてリアクションホイールも搭載したことです。
ーーむむむ。最初からかなり難しい言葉がでてきましたね。まず、人工衛星の姿勢を制御するために、電線の糸巻きみたいな(電磁)コイルや、金属板のようなヒステリシスダンパが果たす役割というのはどういうものなんでしょうか?
米谷 一般的には超小型人工衛星では、衛星内部に磁石を搭載することで、衛星の磁石の磁界方向が地球の地磁気を追うようにするというメカニズムがあります。ただ、これだと地球磁場に沿って周ると地球自体のN極、S極にあわせて姿勢を変えられないのですが、磁気コイルは電流の流す向きを変えることで、N極やS極に対して姿勢を変えることができるにようにしました。また、人工衛星は地球の周りだけでなく衛星自体が回転しているので、回転しすぎないようにヒステリシスダンパは回転速度を減衰させる役割があります。
ーー目が回りそうな高速だとアームを出した時にバランスも崩れそうですし、写真もぶれそうですね。
米谷 アームが開いたときに姿勢制御にどう影響するかについてはかなり検証しました。そこで高速回転をしたらまずいので。ただ、その回転で写真をとるカメラの焦点がぶれるということより、そもそも写真をとりたい方向にカメラをきちんと向けられるように姿勢を制御することが一番大事なんですよ。
ーーなるほど。そのメカニズムの説明についてはかなり複雑なので、簡単な説明は以前に磁気コイルを手巻きしていた頃のウェブ記事を読んでいただくということにして(笑)、リアクションホイールは宇宙に飛んでいる人工衛星の姿勢制御としてよく使われると思うのですが、「実験的」ということは、10センチ角(1U)のキューブサットにリアクションホイールを搭載することはあまりないのでしょうか?
米谷 そうですね。1Uのキューブサットで、厳密な姿勢制御を必要とするミッションはあまりないように思います。そのため、必然的に姿勢制御にこだわるところもあまりないですね。RSP-00(2018年にリーマンサット・プロジェクトが初めて宇宙に飛ばしたキューブサット。いわゆる『零号機』)でも姿勢制御には1Uのキューブサットの姿勢制御によく使われる磁石を搭載していました。もちろんモーターを搭載しているキューブサットもなくもないのですが、フィードバック制御までしているところはあまりないように思えます。
ーーえっと、フィードバック制御とは?
米谷 フィードバック制御とは、搭載したセンサ等の値を元にして指定した目標値になるように制御することです。身近な例としてはエアコンで温度を設定すると、設定温度になるようにコントロールできますよね。温度センサにより室内温度を測定して、その温度が設定値になるように温かい空気や冷たい空気を出してあげるというイメージです。
ーーなるほど。そこまでしてリアクションホイール搭載にこだわった理由はなんでしょうか?
米谷 やっぱり「趣味の団体だからこそやりたいことをやろう!」とRSP-01の三井プロジェクト・マネージャーと言ったんですよね。他でやっていないことだから、この開発を今後に活かせるのではとも思いました。なので、RSP-01のメインミッションは「宇宙空間で自撮り」なんですが、姿勢制御の開発についても新たに挑戦することは、RSP-01プロジェクト立ち上げ当初から、どのような機器を搭載するか等かなり詰めた話をしていました。自分はRSP-00プロジェクトでも姿勢制御系にいましたが、その時は磁石を使っていて、RSP-01では磁石ではなく、磁気コイルを3本搭載するか、リアクションホイールを搭載するか悩みました。結局、コイルを3本搭載している人工衛星は他にもあったので、1本の磁気コイルとリアクションホイールを搭載しようということになったんです。

ーー開発で一番大変だったことは何ですか?
米谷 どうやって人工衛星の姿勢制御をするのかという選択をするのでも、RSP-01はとにかくやりたいことがいろいろ詰め込まれているので、1Uという限られたスペースや打ち上げまでに実装するスケジュールの問題などの制約のなかで、やりたいことをどこまでできるのか、より挑戦的なことを総合的に考えながら開発したことです。
正直、リアクションホイール搭載はかなり挑戦的な試みなので、コンパクトな筐体のなかで電圧出力はどこでどのくらい、どの条件下でといった設定をする時に他の開発系統に迷惑をかけないようにというのもかなり考えました。
また、モーターは購入したのですが、キューブサットの大きさや重量の制限をクリアし、宇宙空間で動き、ちゃんと綺麗に回るものを選定するのが大変でした。磁気トルカについても、磁気コイルから求めるレベルの磁気がきちんとでるかシミュレーションを重ねて、他の人工衛星の磁気トルカとも比較検証した上で軸を選定しました。
ーー磁気コイルって、単に鉄の棒にぐるぐる電線巻いているだけではなかったんですね。
米谷 違いますよ!ただの鉄の棒ではないですよ。あれ高いんですよ(笑)。電流を流した時にどれくらいの磁力をもつのか、また電流が流れなくなった時にどれくらい磁場が残ってしまうのか。(磁場が残ってしまうと他にも影響がでてしまうので)残留磁場ができるだけ少なくなるように大きさと材質を決めました。そのため、軸とダンパーはオーダーメイドでつくっています。たぶんあれが一番お金がかかっているんではないかと。また電線もこの軸にどの太さの電線を何巻すればいいのかも大事です。
ーー以前に、コイル巻機を買ったから巻いてみよう!という時に私も巻くだけでしょとチャレンジしたら、私はブクブクのみのむしにみたいなコイルになって、米谷さんは美しく巻いていた記憶があります。それでも米谷さんはこれじゃ全然だめだから練習しないとなと言っていたのが印象に残っていて、しばらくしたら大分慣れてきたと言っていて、最後にはすごく綺麗に巻かれていましたよね。
米谷 コイルも買えないわけではないのですが、やはり自分たちでつくるリーマンサットなので、自分で巻きたかったですよね。あの時のコイル巻機は、なかなか目指すレベルにうまく巻けなかったので、結局(RSP-01の筐体もつくっている)有路さんに軸巻機もつくってもらいました。RSP-01はそれを使って巻いていますが、クラウドファンディングで姿勢制御の講習会に申し込んでくださった方にお渡しするコイルもそれで巻いていて、ちょっと記念になるようにしたいなと思っています。
ーー宇宙で動かすものを地上で試験しなければならないところは人工衛星開発で難しいところですが、どのような試験をしたのでしょうか?
米谷 やはりRSP-01はアームを出すので、アームの伸び縮みで重心がどう変わるかというところは難問です。コンピューター上で計算してひととおりのパターンでシミュレーションを重ね、またコイルの力でバランスを保てるかの検証はかなりし ました。また、慣性モーメントの試験(軸のまわりを回転する物体の質量と運動の速度の関係をはかることで運動エネルギーを計測する)も、大型の人工衛星の試験機はありますが、キューブサットの大きさは対象外なので、つるして回してみたり、水の上にうかせてみたり、いろいろ試しました。それでも考えられない方向の動きがあって測りたいデータがとれないということもあり、一番安定したのはハンドスピナーの上に載せて回した試験ですね。やはり宇宙で動くものを、3軸を完全にフリーにできない地球上で厳密な試験をすることはできないので、本当に難しいです。
ました。また、慣性モーメントの試験(軸のまわりを回転する物体の質量と運動の速度の関係をはかることで運動エネルギーを計測する)も、大型の人工衛星の試験機はありますが、キューブサットの大きさは対象外なので、つるして回してみたり、水の上にうかせてみたり、いろいろ試しました。それでも考えられない方向の動きがあって測りたいデータがとれないということもあり、一番安定したのはハンドスピナーの上に載せて回した試験ですね。やはり宇宙で動くものを、3軸を完全にフリーにできない地球上で厳密な試験をすることはできないので、本当に難しいです。
ーー姿勢制御系にはどういう経緯でリーダーになり、メンバーはどんなふうに一緒に作業をしていたのですか?
米谷 RSP-00の開発の時も姿勢制御系にはいたのですが、次はもっと挑戦的な姿勢制御の開発をしたいなと思って、RSP-01では姿勢制御系のリーダーに立候補しました。当初はRSP-00の姿勢制御系開発リーダーの大村さんと大淵さんがいました。途中で制御工学が専門のゆういちさんも入ってくれましたが、ゆういちさんは構造系リーダーにもっていかれてしまいました(笑)。最終的には大学院生の大淵さんと二人三脚で頑張ってやってきました。

ーーRSP-00プロジェクトとRSP-01プロジェクトの両方に参加されていたわけですが、だいぶ雰囲気は違いますか?
米谷 リーマンサットの開発プロジェクトって、プロジェクト・リーダーの特徴で雰囲気が違うなと個人的には思っています。RSP-01プロジェクトは20代後半から30代半ばが多く、開発がしたくて入ったという人が多かった気がするので、研究室みたいな感じでひたすら開発をしていた時間がすごく多かった気がします。
ーー研究室みたいな雰囲気感ありましたね。もちろん、今日はここまで一仕事したから飲むよ!遊ぶよ!という楽しさもあったのですが、RSP-01はそういった活動のメリハリがきっちりしているなと思いました。仕事ではないけれども(笑)。さて、米谷さんは普段どういうお仕事をされていて、それがどうRSP-01「姿勢制御系」開発としての活動につながったのでしょうか?
米谷 普段は金融工学を使った銀行や証券向けの業務・リスク管理システムやベンチャーキャピタル向けの投資管理システムを作っています。また、大学時代は天文学を専攻していたので制御工学のバックグランドはないです。そのため、仕事のスキルがリーマンサットの活動につながったことはあまりないかもしれませんね(笑)。ただ、逆はありましたね。姿勢制御のシミュレーションでは微分方程式というものを用いるんですが、金融工学だと、さらに確率的な要素を加えた微分確率方程式を用いて計算する場面があるんですよ。それを理解し実装する際はリーマンサットで学んだ経験は役立ちましたね。
それ以上に、姿勢制御という全くやったことがない分野をゼロからやってみて、意外と独学でも勉強したらできるのだなと思ったというのは大きかったですね。もちろん本職としている方にはかないませんが、仕事でもやったことのない金融商品の計算をいきなりふられても、ものおじせずに、ちゃんと勉強すれば、やったことのない分野でも身に着けて結果をだせると思えるようになりましたね。
ーー最後に活動で一番楽しかったこと、次に向けた想いを聞かせてください。
米谷 RSP-01活動で一番楽しかったことは、みんな一生懸命でぶつかりあったことです。大の大人がここまで熱く何かをするってなかった気がするし、一緒に作って話して人工衛星という特殊なものをつくることができること、そして宇宙に打ち上げられる機会や場所って身近にはない。これは、何かをつくりあげた達成感とは違う別の思いです。
リーマンサット・プロジェクトって、いろんな人が集まって会社と違ってリスクとか考えずにやれるんですよね。次は、打ち上げとか納期とか気にせずに研究チックなことをメンバー集めてやりたいなというのはあります。特に1Uの衛星開発に役立つようなものを作りたいですね。例えば、リーマンサットや大学の学部生が使えるような1Uの姿勢制御シミュレーターとかつくれたらいいなと思っています。衛星のパラメータも画面で入力して簡単にシミュレーションできるような。
トルクコイルの概念図やRSP-01姿勢制御系のトルクコイルって手巻きなの?と思った方は、是非こちらもお読みください。
そのまた未来へ、RSP-01プロジェクト、まだまだ新たなチャレンジを続けています!
ただいま運用メンバーも募集しています。参加についてはこちらから。
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】鬼頭 佐保子
広報部 技術広報課長、技術部RSP-01プロジェクトC&DH系、rsp.横浜支部長。
趣味は宇宙開発、宇宙教育、星空案内、美味礼賛。7つの海を渡るのが夢。