こんにちは!リーマンサットローバーチーム広報の細田佳江です。
9/19、北海道の植松電機さんが開催したスペースプローブコンテストに参加しました!
スペースプローブコンテストでのローバーチームの様子をお送りしたいと思います。
スペースプローブコンテスト2020とローバーチーム
昨年は北海道にローバーチームメンバーで赴き、植松電機さんのロケットでローバー”zipangu0号”を打ち上げていただきました。
今年は新型コロナ感染症拡大防止のため、現地である北海道には集まらず、リモート開催。
機体や道具を事前に北海道に送り、各チームや審査員はzoomで参加しました。
植松電機さんにとっても初めての取り組みということで、各参加チームからの質問を共有していただいたり、事前に打ち合わせを重ねました。
ARマーカー台を設置することについては、
「想定外でしたが全然アリです。こういったルールの穴をつくような発想は大好物です」
とのこと。
いつも広い心で受け止めてくださる植松電機さん、ありがとうございます!
大会当日!
いつもは夜型生活のメンバー達も、朝8:00に「コワーキングスペース茅場町Co-Edo」に集合。

手指消毒のアルコールを用意していただいたり、衛生対策もバッチリです。
北海道に行ったつもりのアンテナショップで購入したとうきびチョコと茅場町のスタバの会議用コーヒーセットを用意しました。

今回のミッションシーケンスはこちらの図のようになっています。
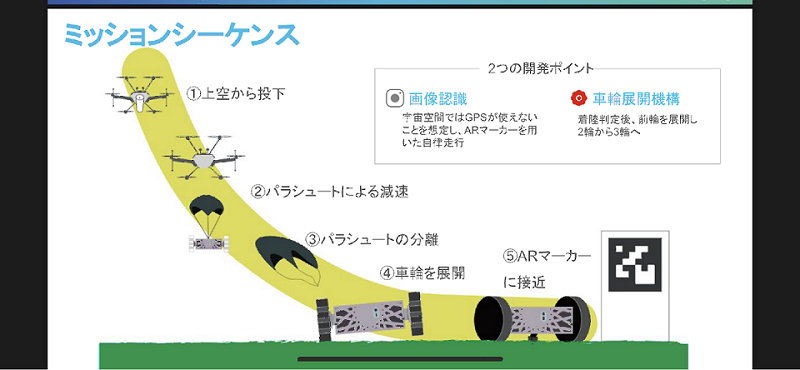
ローバーは、植松電機さんのドローンより100mの高さから落下後、パラシュートにより減速し、着陸します。
そして、AR(拡張現実)マーカーを認識し、ARマーカー台の方へ移動します。
zipangu01号にはスマホが搭載されており、着陸後に東京と通信し、ログや画像が送られます。
当日、植松電機さんに北海道の写真を送っていただきました。
開催問題なしとのこと。
さぁ、いよいよですね!
大会スケジュール!
8:30 リハーサル
9:00 開会
9:10 事前プレゼンテーション
10:20 投下審査
11:30 前半終了(事後プレゼンテーション準備)
14:00 事後プレゼンテーション
15:15 結果発表
15:30 閉会
今回のスペースプローブコンテストは4チームが出場しました。
順番は、
①リーマンサットローバーチーム
②コスモクラフト
③琴似工業高校
④チーム岩井家
です。
なんと、リーマンサットローバーチームが1番目!
まずは事前プレゼンです。

先日の実験で壊れたローバーと共に見守ります。
前回最優秀賞の岩井家さんは、今年は事前プレゼンのみで棄権とのこと。
また来年が楽しみです!
投下!
投下準備です。
zoomで連絡を取りながら、植松電機の方にローバーのスイッチ2箇所を入れていただきました。
そんな中、現地は雨が降ってきそうだとのこと。
ARマーカーは、プラスチックダンボールにARマーカーを印刷した紙が貼り付けてあるだけなので、せっかく設置していただきましたが一時撤去となりました。
植松電機さんが各チームの起動可能時間を確認。
ローバーチームは完全に雨が上がりそうな時間を見て、1番最後になりました。
10:15投下審査開始の予定でしたが、11:15からに変更です。
時間が空いた隙に、準備しているメンバーをのぞいてお昼ごはんの買い出しに行きました。
おにぎりやサンドウィッチなど、手軽に食べられそうなものを買います。
去年の北海道でも、いっぱいパンやおやつを買い込んだなぁとなんだか懐かしい気持ちになった広報でした。
さて、ついに投下開始です!

ドローンに搭載する重量が1kg以内というレギュレーションがあるため、重量測定。
1kg以内でした!
ドローンで100mの高さまで運びます。ドキドキ。
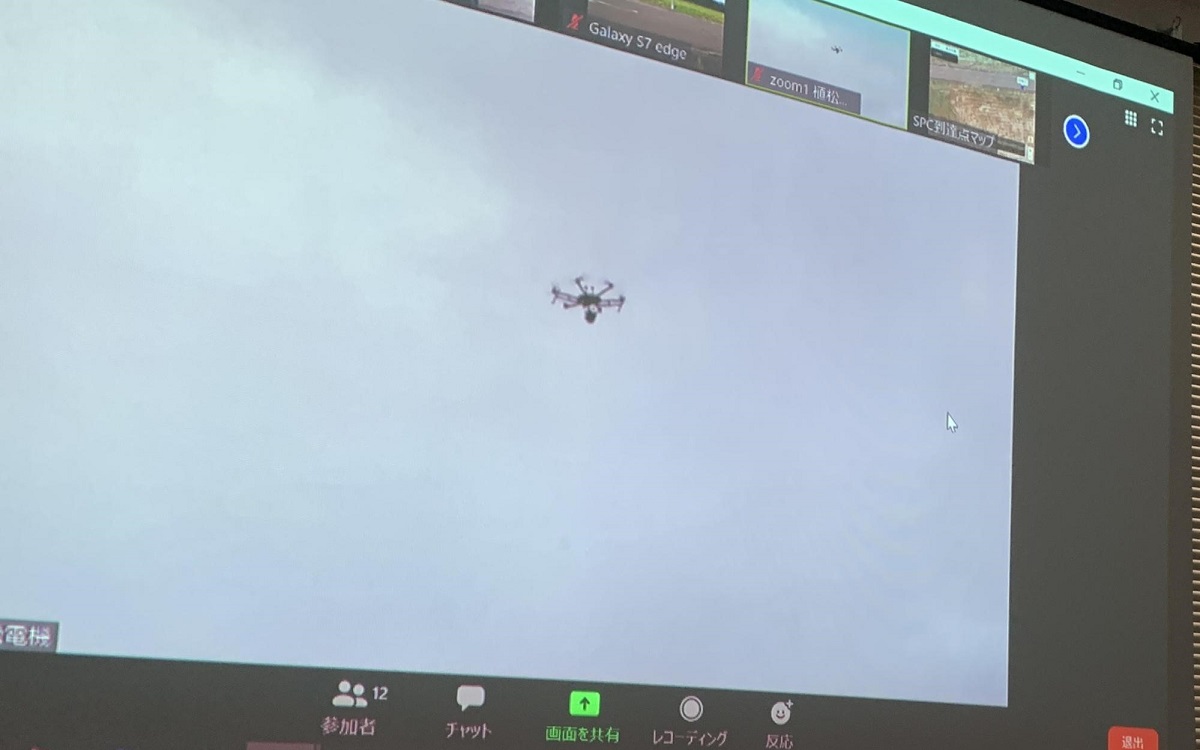
パラシュートがちゃんと開傘しました!
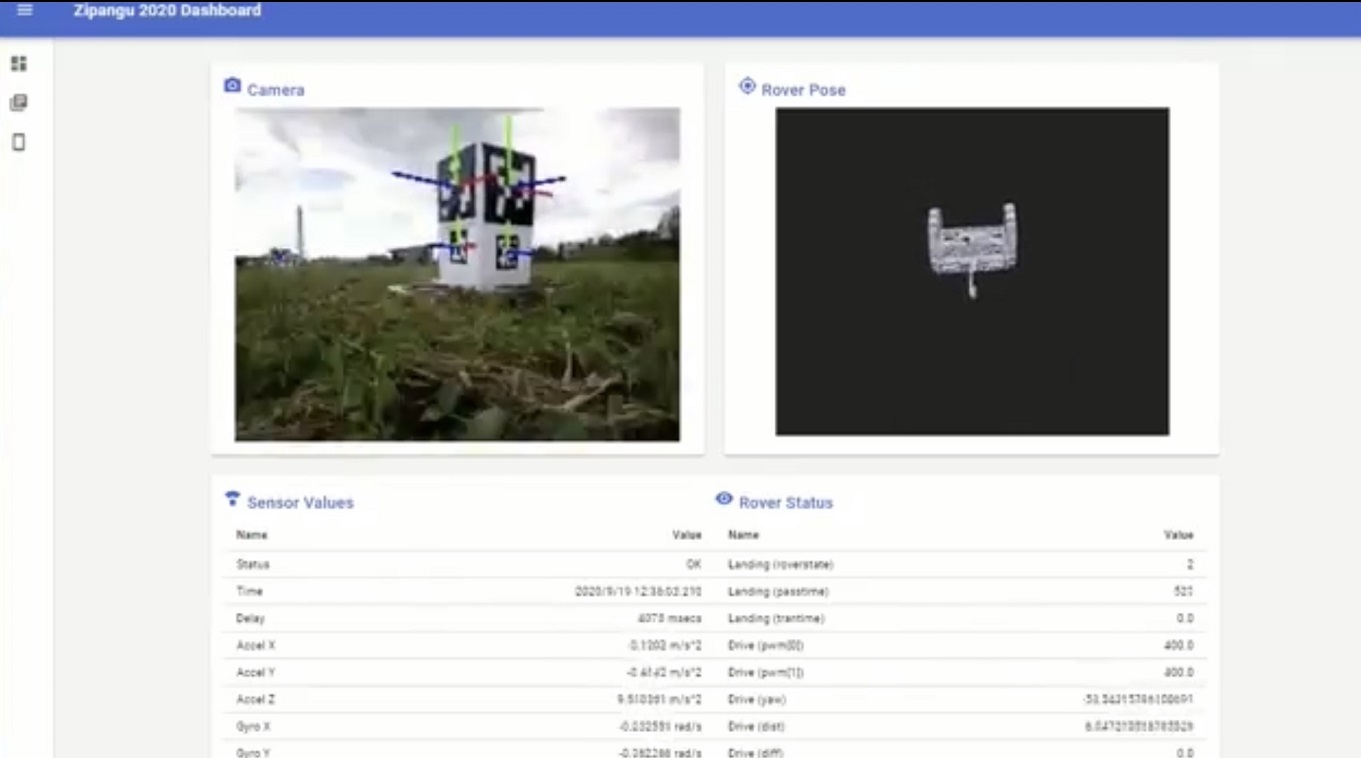
それでは、着陸後にスマホから送られてきた北海道のいい景色をお楽しみください。
着陸後、ローバーが動きません。
どうやら逆さ向きになってしまったようです。
また、タイヤも歪んでいるよう。
ARマーカーを認識しているところを見たく、そのまま人力で近づけていただきました。

認識しました!
事後プレゼン!
さて、次は事後プレゼン準備です。
あらかじめ、結果を当てはめていければ良いようにある程度スライドを作ってあるものの、14:00事後プレゼン開始という短い時間で作成するため、皆さん真剣な面持ちです。

でも、事後プレゼンが終われば、後はリラックス。打ち上げは毎回恒例のターリー屋です!
がんばれ!

後ろから見守るメカアドバイザー。
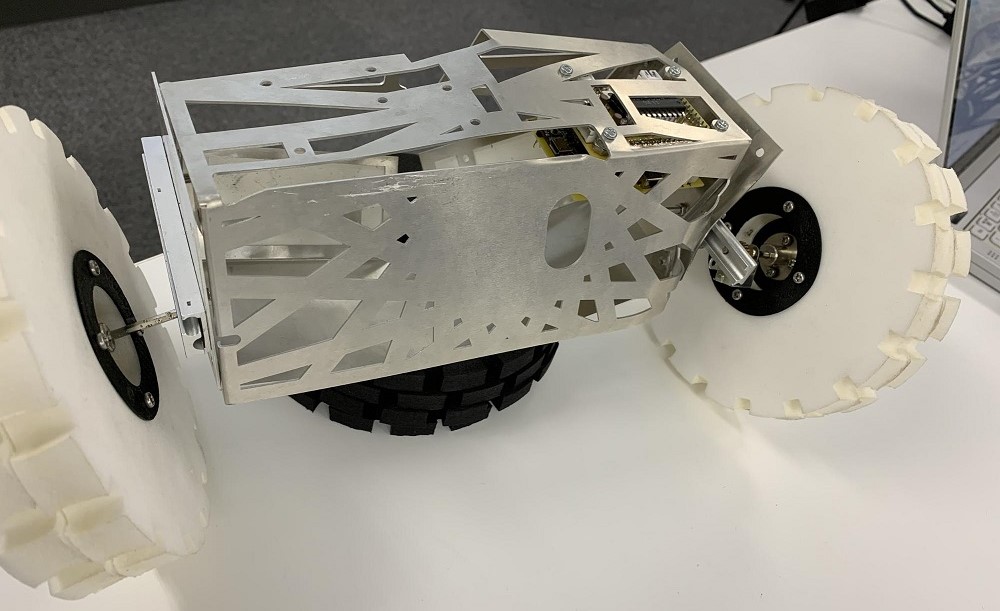
今回の大会では、ローバーが落下後動きませんでした。
重心が左寄りで、左から落ちてボディが曲がってしまいました。
また、シャフトが抜けてしまいました。

右の車輪は問題なく回っていました。
今回新たについた後輪はというと、草の中に埋まってしまいました。
やはり、草対策が必要なようです。
画像認識については、30m程度を想定した大きさのARマーカーを用意していました。
しかし、ターゲットから60mほど先に落ちたため、認識できませんでした。人力で近づいたら認識できました。
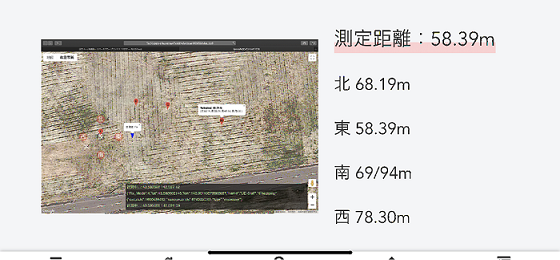
(植松電機HPよりローバーチーム結果)
zipangu01号は、他のチームの円筒の機体に比べて風の影響を受けやすい形状でした。
結果発表!
ローバーチームは昨年に引き続き、優秀賞をいただきました!ありがとうございます!
操作性に関しては、スイッチ2箇所のみで、「運用させない運用」と高得点でした。
機体に関しては、植松社長より
「タミヤ はもっと頑丈だから参考にしたらいいよ」とやんわりと機体の弱さについてご指摘がありました。
ログや画像は地上で通信をはじめてから10分程度で回収できると説明した際には、
「へー!いろんな分野の人がいるからできることなんだねぇ羨ましい」
とリーマンサットローバーチームの良いところをおっしゃっていただいたようで嬉しかったです。
今回参加された他チームの方達も、さすがの操作性の良さだったり、参考にすべきところが沢山ありました。また交流できるようになると嬉しいです!

以上、スペースプローブコンテスト出場日の様子でした。
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
あなたも一緒に、ローバー開発してみませんか?
リーマンサットメンバーの活動を下記にまとめました。ぜひご覧ください!
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】技術部 ローバーチーム広報
細田 佳江(ほそだ よしえ)
カポエイラと宇宙が好きな管理栄養士です。宇宙でサウージするのが夢です!