こんにちは!ローバーチーム広報の細田佳江です。
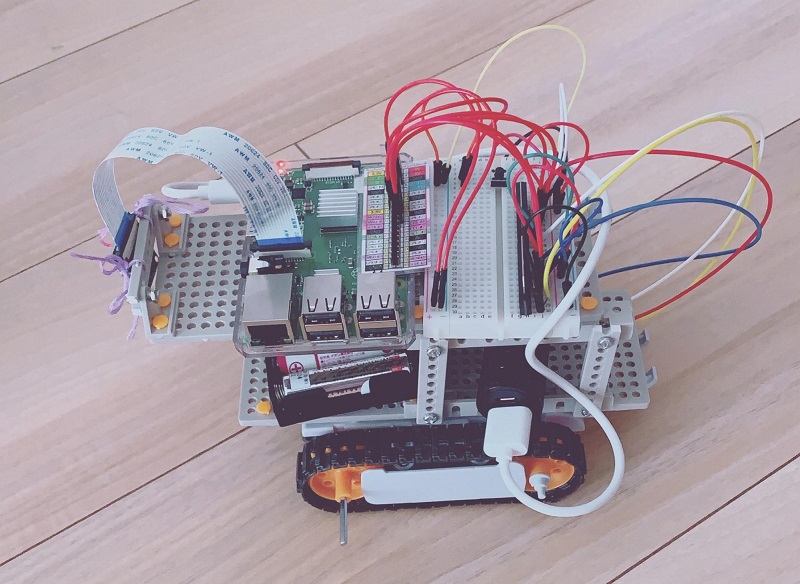
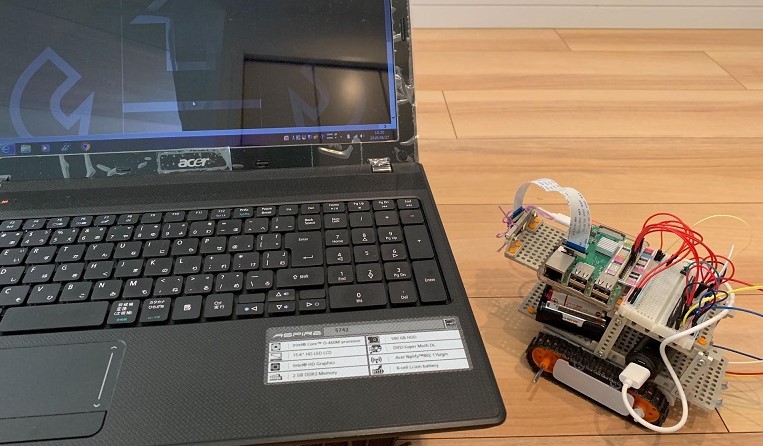
ローバーチームの広報なんてしていいのかというくらい全く知識のない私が、ラズパイ*などを購入し、本を読み、人の手を借りながら約2ヶ月でこの写真のローバーを作りました。
そして、リーマンサット内部でのレースで優勝する事ができました!
新しいことにチャレンジしたいけど、なんとなく怖い、という方の参考になれば幸いです。
不格好でもいい😅初心者だもの。
勉強の一環として参加しようと決意
私は2018年の12月からリーマンサット・プロジェクト、そしてローバーチームへ参加しました。
何ができるか分からず、プロジェクトマネージャーにローバーチーム専属の広報担当はどうですか、と勧めていただいて始めた広報。
しかし、今まで機械について気にしたこともなく、プログラミングもやった事がありませんでした。
皆さん親切に色々と教えてくれるのですが、どうやら初歩的すぎてどう教えていいか迷う方もいるようで…。
次第に皆さんの話についていけず、ミーティング中にボーッと別の事を考えてしまうようになりました。
これからどうしていこうか、と悩んでいたところ、リーマンサットメンバーが開催するレースが6月にあるとの事!
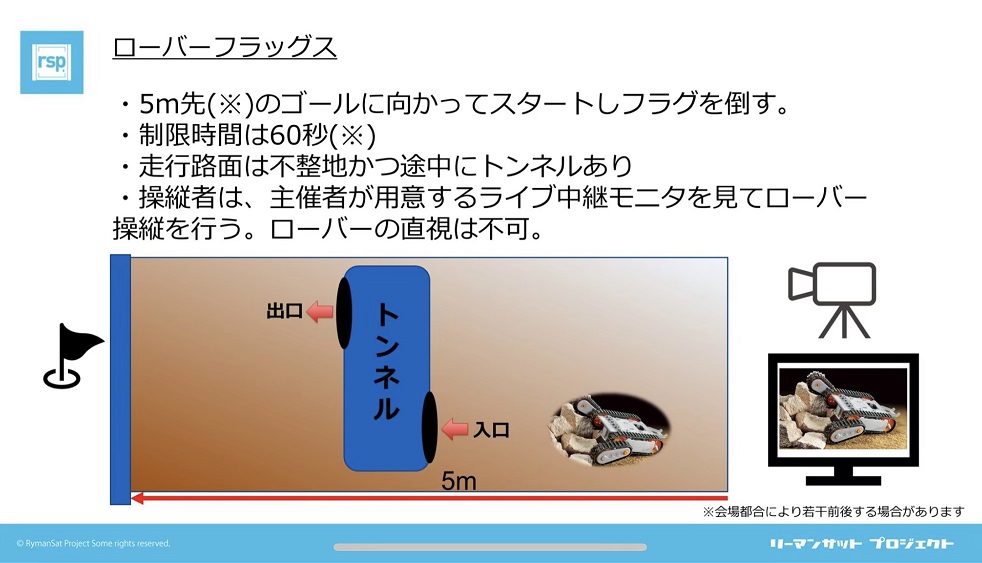
前回は、チキンレース=壁のギリギリで止まる、というレースのみでしたが、今回はカメラの映像でトンネル内をローバーを動かし、フラッグを倒すというレースも同時開催するとのお知らせがありました。
ローバーチームもslack(開発で使用しているコミュニケーションツール)で、画像認識について盛り上がっていたところ。
(まさしくこれが今の私に必要な事じゃないか⁈)
と思い、勉強の一環として参加してみる事にしました。
まずはリーマンサット定例会後の懇親会で主催者に声をかけてみました。
立食だからか、気さくにいろんな方に声をかける事ができて楽しい懇親会です。
「あの、ローバーフラッグスレースに出てみたいのですが、どうしたらいいですか?」
「まず、キーボードとマウスを用意して、カメラはこういうので、こういう風にさして」
「???」
全然出来上がる気がしません。初心者すぎます。
すると、横から別のリーマンサットメンバーが。
「まさに今回のためのものじゃないかっていういい本があるんだよ!買って読んだことはないけど評判もいいみたいだよ。カラー図解の方だからね!」
と、こちらの本を勧めていただきました。
早速Amazonで購入したのが4月。
さぁ、製作スタートです!
ローバーチームのメンバーにも、ローバーフラッグスレースに出てみようと思うと伝えたところ、「わからないことがあったらいつでも聞いて」と有難いお言葉。
やる気出ました!
ラズパイ* ・・・Raspberry Pi。教育で利用されることを想定して作られた小さなマイクロコンピュータ。
ラズベリーパイとは?!
まず、購入した本を開けてみると、私みたいな初心者でもわかりやすく、電気の流れなどから説明…!助かる!
用語に振り仮名まで…!
pythonの歴史から書いてありました。raspberry pi を意識したネーミングとの事。
この本では、pythonという言語を使用するようです。
本に載っている通り、USBマウス、キーボード、raspberry pi 3B+を購入。
本に、ラズパイを選ぶポイントが載っていて、超初心者の私は1番手が掛からなそうなものにしました。でも、1番お高いですね。
Yahooショッピングで、色々みたところ、アウトレットを発見。
ちょっとだけ安くなったのと、初心者用に、ピンの名前や番号がわかる一覧などをつけてくれていました。
また、有難い事に、この本に必要なセットが秋葉原の秋月電子に売っているとのこと。出来上がりまで2ヶ月しかなく、時間がないと思った私は早速秋月電子へ。
お店の方に尋ねると、奥から出してきてくれ、無事に購入できました。
ブレッドボードや、オスメスのジャンパーワイヤー、LEDなど色々入っています。
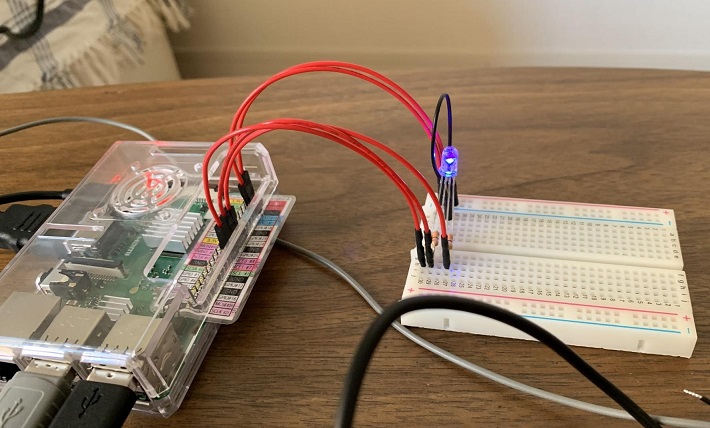
急にローバーを作り始めるのではなく、LEDを光らせるところから順番に始める事にしました。
slackで、ローバーチームメンバーが各自のローバーの進捗を報告するところ、私は私の進捗を報告。
皆さん、褒めてくれたり、楽しそうと言ってくれるのでやる気出ました。
これは、Lチカと言うのですね!なるほど、LEDチカチカ。
3色点灯させたり、少しずつレベルアップします。
回路も少しずつ複雑になりました。
そして、朝から始めたのに外はもう薄暗く⁈
私にはもう集中力なんてものはなくなったと思っていたので、今回まだある事がわかってよかったです。
いや、こんなに時間がかかってしまったのは、ラズパイから普通にインターネットをみられる事がわかって、色々みてしまったのでした。
初日は順調!
これは、なんとかなるのでは?結構いけそう!
という軽い気持ちはここまででした。
私の最終目標は、スマホでカメラを見ながら車体を操作する事でした。
今回のレースではライブ中継モニターが用意されていましたが、本の付録にカメラで映像を映す方法が載っていたのと、手軽に操作ができるようにしたいのとで決めました。
本によると、スマホで操作するために、webIOPiというのものに接続しないといけなかったのですが、家のポケットWi-Fiだとどうしてもうまくいかず、ローバーチームにslackで相談。
ちょうど定例会の日程が近かったので、直接みてもらう事になりました。
定例会当日、コエドにラズパイとキーボード、マウスを持っていきました。
モニターがなかったので、休憩時間に前方のスクリーンを借りることに。
コエドのWi-Fiではうまく接続できたので、ポケットWi-Fiの方に問題があるようです。
ローバーチームメンバーがポケットWi-Fiの設定を変えてくれました。
頼もしい…!よかった…!
これで家でも続けられます。
ローバーを組み立てよう
さて、そろそろ機体の組み立てもしていかないといけません。
タミヤ のアームクローラー工作セットを購入しました。
基本のセットはモーターが1つです。しかし、それだと前後にしか動けないので、同じくタミヤ のツインモーターギアボックスを購入して、左右にも動けるようにしました。また、ラズパイを乗せる台なども本に従って購入しました。
また、別の団体で”宇宙展示”の手伝いをする事になっていたので、会場の方の了解を得て空いている時間にアームクローラーを作りました。
普段、カッターを使ったり、ネジを締めたりしないのでうまくできません。
一緒に留守番をしていた方に手伝ってもらいつつ、その方のやり方をチラ見。
なるほど、カッターはそういうふうに使うのか…。慣れている人は断面がキレイ!
私もだんだん慣れてきて、作成スピードが上がってきました。しかし、出来上がったのはツインモーターギヤボックス周辺のみ。
まだまだ先は長いです。
迫る期日!火花散るモーター
本に沿ってLチカから地道にやってきましたが、期日が迫ってきました。
ローバーチームに、同じ本で全部やってみたというメンバーがいたので、最終的にローバーを作るのに必ずやらないといけないのはどれかを聞いてみました。
いくつか省略していい事が判明。しかし、ほとんどはやっといた方がいいとの事。
う〜ん、やるしかないか。
がんばれ、私の集中力!
音を出したり、カメラで画像を撮ってみたり、とりあえず必要なものは一通りやりました。
カメラですが、ラズパイカメラは高いので、Amazonで1000円弱の安いものを購入。初心者なので壊しそうだし…。
画像ファイルが見つかりませんでしたがそれもとりあえず飛ばします。
モーターを回してみるところでは、全く回らなかったので、またしてもslackでローバーチームに相談。写真を載せたところ、
「モータードライバが逆に見える?」
わ〜本当でした!恥ずかしい!
ちゃんとモーターが回って、速度も変えられました。
進んでいくにつれて、コマンドが複雑になってきます。エラーが出ると思ったらコマンドが大文字だったり、スペースがなかったり。
凡ミス多発です。
機体も組み上がってきました。モーターのノイズを除去するために、コンデンサーをはんだ付けします。
はんだ付け、中学校以来です。
どうやって使うんだっけ?
どれくらい当てていいのか分からず、モーターに熱を加えてしまったようです。1つのモーターは動くのに、もう1つが動きません。
slackで助けを求めます。
「電池をモーターに直接繋いで動くなら大丈夫」
なるほど。やってみます。
火花が出ました!
「動くなら火花が出ても大丈夫です」
そういうもんですか…。
結局火花だけでうんともすんとも動かず、モーター1つだけ取り替える事にしました。
新橋に、タミヤプラモデルファクトリーがあるのを見つけ、お店の人に相談してみました。プラモデルについて熱く話すお店の方。モーター単体で販売していたので早速購入しました。
セットで販売していたモーターはケーブルが付いていたのですが、モーターだけ販売されていた今回はケーブルを自分でつけないといけないようです。
秋葉原の秋月電子に行きました。ケーブルの太さがいろいろありました。
店員さんに本を見せて、モーターに合うケーブルはどれか尋ねました。
「多分、これでいいですけど、違ってたら発火します」
えー!!
隣にいた女性のお客さんも、
「私も電気流すよ!でも発火したらやだね!」
ケーブルのあたりで和気あいあいとしてしまいました。
家に帰って恐々ケーブルをはんだ付けしてみます。
大丈夫みたい!
電池を直接繋いでも火花は出ないし、ちゃんと回りました。
改めて組み立てなおします。
どうやら良い感じに土台ができました!
あとは、ラズパイや電池を載せる部分です。ラズパイ 用の電池とモーター用の電池は別にしました。
全て組み立て終わり、キーボードを繋げて無事動くことを確認。
ラズパイとカメラ
問題は、カメラです。
写真を撮るだけではなく、映像を常時映すようにするにはmjpg-streamerというソフトウェアを入れないといけないようです。
本に従ってコマンドを入力します。
あれ?出るはずの画面が出ない…。
失敗した場合に余計なファイルを削除する方法も本に載っていたので、削除してまた1からやり直してみます。
う〜ん…これは…またローバーチームの力を借りるしかないか💦
slackで、画面の写真を送りながらどうしたら良いか聞きます。
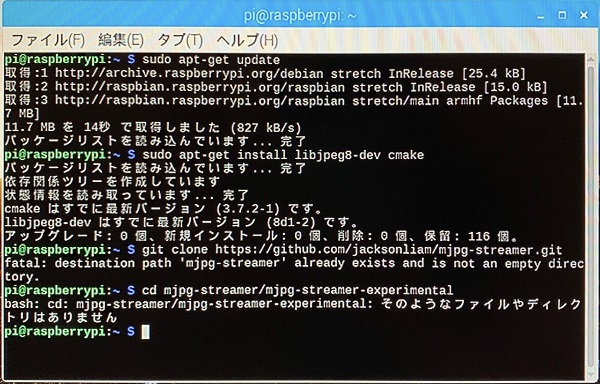
そのようなファイルやディレクトリはありませんとは…。
「lsと入れてみてください。ちなみに、cdはchange directoryの略で、lsはlistの略です。」
とメンバーよりアドバイスがありました。
なるほど、全然分からず入力するよりも、覚えやすい!
結局、必要なファイルが取り込めていないらしく、また初めからやり直し。
夜中まで付き合ってくれるメンバー。
何回かやって、やっと取り込めたようです。
ところが、やはり画面が映らず!と思ったらカメラがちゃんとはまっていないだけでした💦
ちょっと不格好ですが、とりあえず完成です。
カメラは2mmのネジで止めたら良いと本に書いてありましたが、最後になって面倒になり、リボンで結びました🎀
パソコンだけでなく、スマホでも映像を映す事に成功!
ついにレース当日
さて、リーマンサット定例会です。
当日は、外部から豪華ゲストが講演に来ていたため、レース開催が危ぶまれましたが、
「他に影響されず、やりたい事をやったらいい」というリーマンサットメンバー達の要望で予定通りレースが開催される事になりました。
皆さんの励ましでなんとか標的を倒す事ができました!
最後は無理やりでしたが初心者特典か、オーケーだったようです。
そして、なんと優勝する事ができました!
といっても、今回はローバーフラッグレースは私しか参加しておらず一人勝ち。
賞金3000円いただきました!
slackでローバーチームに優勝した事を報告。皆さん喜んでくれました。
勉強につきあってくれたローバーチームにお返しがしたいなぁと、はんだ付けをする時用に、賞金でコテ台、シリコンマットを購入しました。
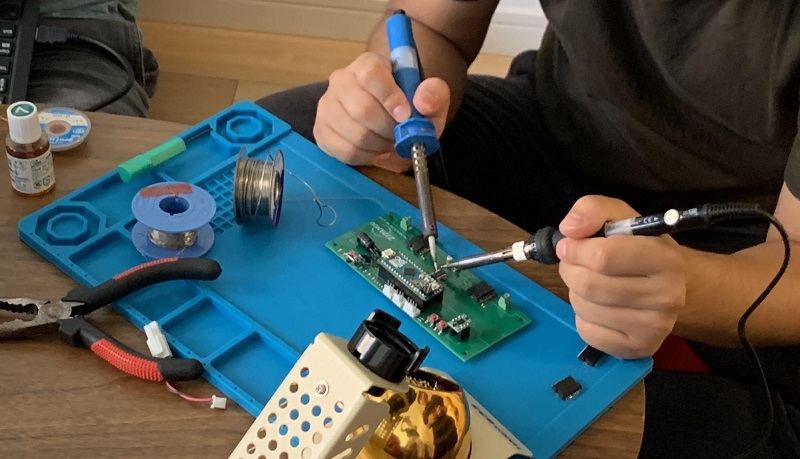
早速使っていただいています。
レースを終えて
今回良かった点
・期限内にやり切ったところ
・素直にアドバイスをいろいろもらえたところ
反省点
・最初はなるべく1人でやろうと思っていたのに、結局他の人達に頼ることが多かったところ
聞けば聞くほどアドバイスをくださるリーマンサットの方達でした。
まだまだ分からないことが多いですが、ちょっとはマシになったかな?
余談ですが、ネジを回すことに慣れたようです。私はカポエイラというブラジルの格闘技をやっているのですが、カポエイラ で使うパンデイロという楽器のネジが外れたまま、9年間ほど直せませんでした。
しかし、キレイにネジがはまって直せました!

また、その後レースを見た方数名が、
「本買って今作ってるよ!」
とローバーチームに来てくれたのが嬉しかったです。
以上、リーマンサット、ローバーフラッグレースに参加した記録でした!
◆◇◆◇◆◇◆◇◆◇◆◇◆◇◆◇◆◇◆◇◆◇
リーマンサット、2022年2月末から4月3日までクラウドファンディング中です。
「憧れを宇宙へ! あなたと宇宙で “人工星座” を作りたい!!」
https://readyfor.jp/projects/rymansat4
私達がこの衛星で作ろうとしている「ロマンチックな人工衛星」と「人工星座」は、きっともっともっと皆さんと宇宙を近づけます。
皆さまのご支援をどうかよろしくお願い致します。
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】技術部 ローバーチーム広報
細田 佳江(ほそだ よしえ)
カポエイラと宇宙が好きな管理栄養士です。宇宙でサウージするのが夢です!