こんにちは!リーマンサットローバーチーム広報の細田佳江です。
ローバーチームのミーティングは、オンライン・オフライン混合で継続しています。この状況にもすっかり慣れてきました。

4月は少人数でDMM.make AKIBA*に集まりました。
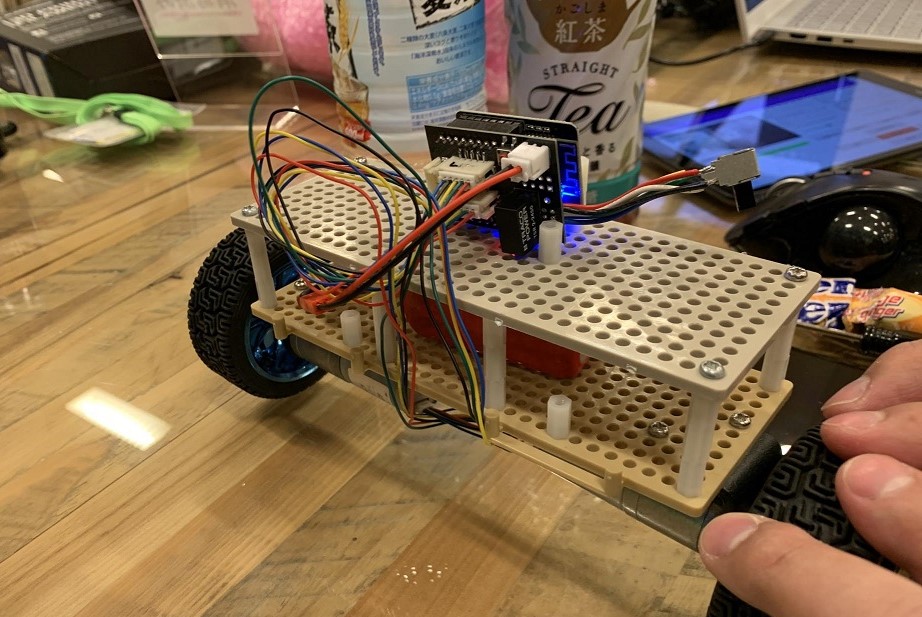
メンバーが作ってきた新しいローバーのプロトタイプをお披露目。
一番上に乗っているのがESP32-CAM(カメラモジュール)付きの自作基板です。基板がとっても小さいです!
ESP32-CAMはこんなに小さいのにしっかり画像も取れました。
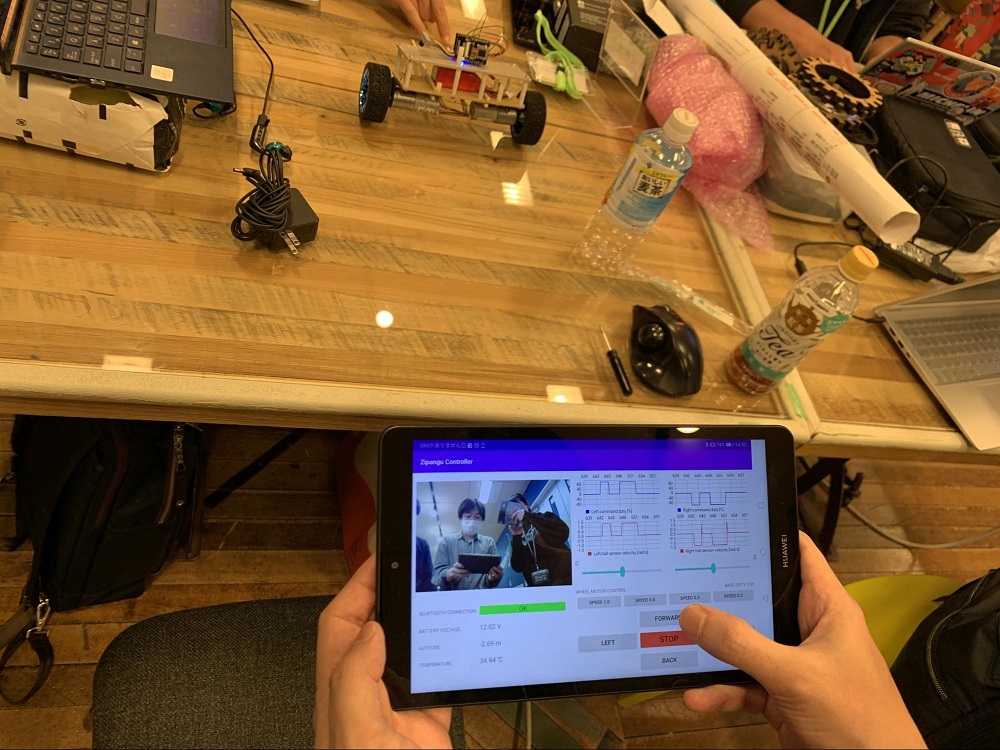
ローバーに見られています。
基板が小さいとローバー内部のスペースに余裕が出てきます。ローバーの軽量化にも一役買ってくれることでしょう。
モーターは回転数をフィードバックする機能がついているブラシレスモーターを使用しています。正確な回転数制御ができるようになり、スタック検知への応用も可能となりました。現在はソフトウェアチームがこうした機能の開発を行っている最中です。
今年の9月には北海道の植松電機でスペースプローブコンテストが開催されるそうです。2年連続で参加している楽しい大会です。
今年こそローバーチームは最優秀賞を狙います!
そして、月探査に向けて心の準備中!
みんなでAstrobotic社の、月へとローバーを輸送してくれる”ペレグリンユーザーズガイド”を輪読しています。
月にローバーを送るにはどんな条件が必要なのかまだまだ勉強中のローバーチームでした。
*DMM.make AKIBA https://akiba.dmm-make.com
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
あなたも一緒に、ローバー開発してみませんか?
リーマンサットメンバーの活動を下記にまとめました。ぜひご覧ください!
https://www.rymansat.com/join
★★★★★★★★★★★★★★★★★★★★★★★★★★★★★
人工衛星は打上げて終わりじゃない、俺たちの戦いはこれからだ!
https://readyfor.jp/projects/rymansat3
クラウドファンディングに挑戦中です!
★★★★★★★★★★★★★★★★★★★★★★★★★★★★★
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】技術部 ローバーチーム広報
細田 佳江(ほそだ よしえ)
カポエイラと宇宙が好きな管理栄養士です。宇宙でサウージするのが夢です!