こんにちは。ローバーチーム広報の細田 佳江です。
9月、いよいよスペースプローブコンテストの開催月となりました!北海道赤平市、植松電機さん主催で行われるコンテストです。
前回の開発報告はこちら↓↓
https://www.rymansat.com/archives/8611
今大会のミッション概要
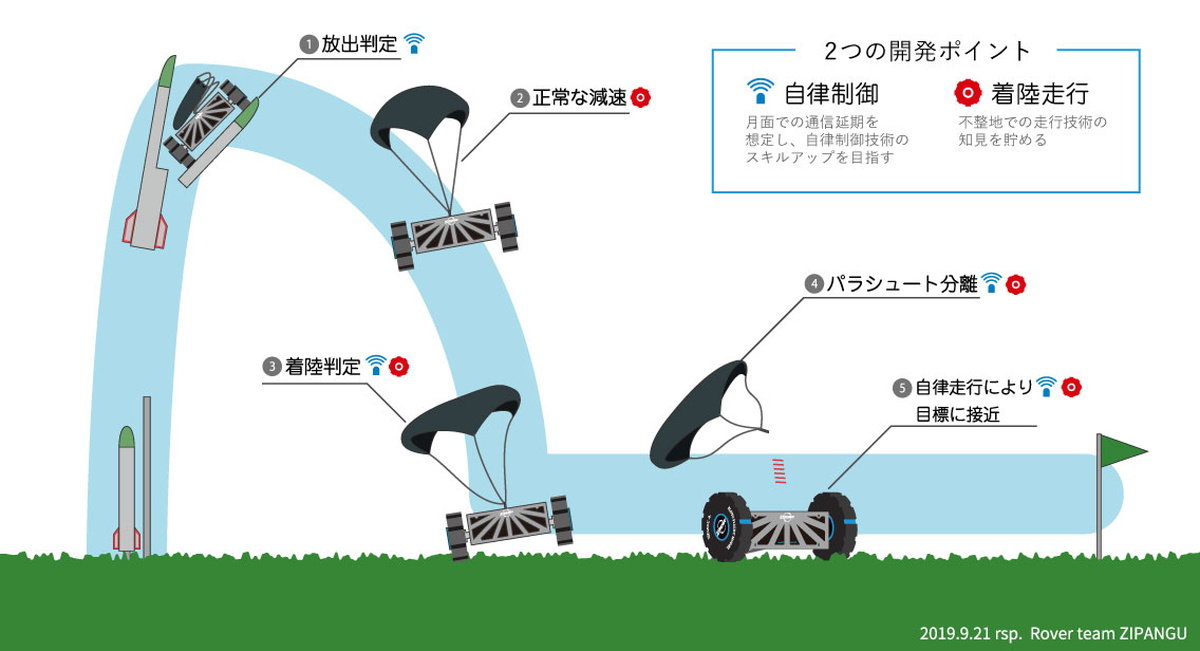
コンテストでは、1kg以内で直径150mmという制約でのプローブ(探査機)を開発し、ロケットで100m上空まで打ち上げて着陸。ターゲットにどれだけ近づけるかを競いました。
私たちローバーチームは、ロケットにローバーを積んでもらい、約100mのところでパラシュート落下、着地判定の後、GPSにより自律的に目標に向かって走り出す機体を作成しました。
9月前半は走行試験、落下試験を繰り返し行い、不具合の洗い出しと最終確認をしました。
また、パラシュートが開きやすいたたみ方を検証しました。



ローバーを何度も落とすわけにはいかないので、洗剤の容器に水を入れ、1kgにしています。
手順は
紐の絡みをほどく→先端同士を合わせて三角に折りたたんでいく→コードをパラシュートの間に織り込んで仕舞う→パラシュートを蛇腹に折りたたむ。
最初、蛇腹に折りたたむ数が多かったのか、パラシュートが開かず、3つに折りたたむ事に落ち着きました。
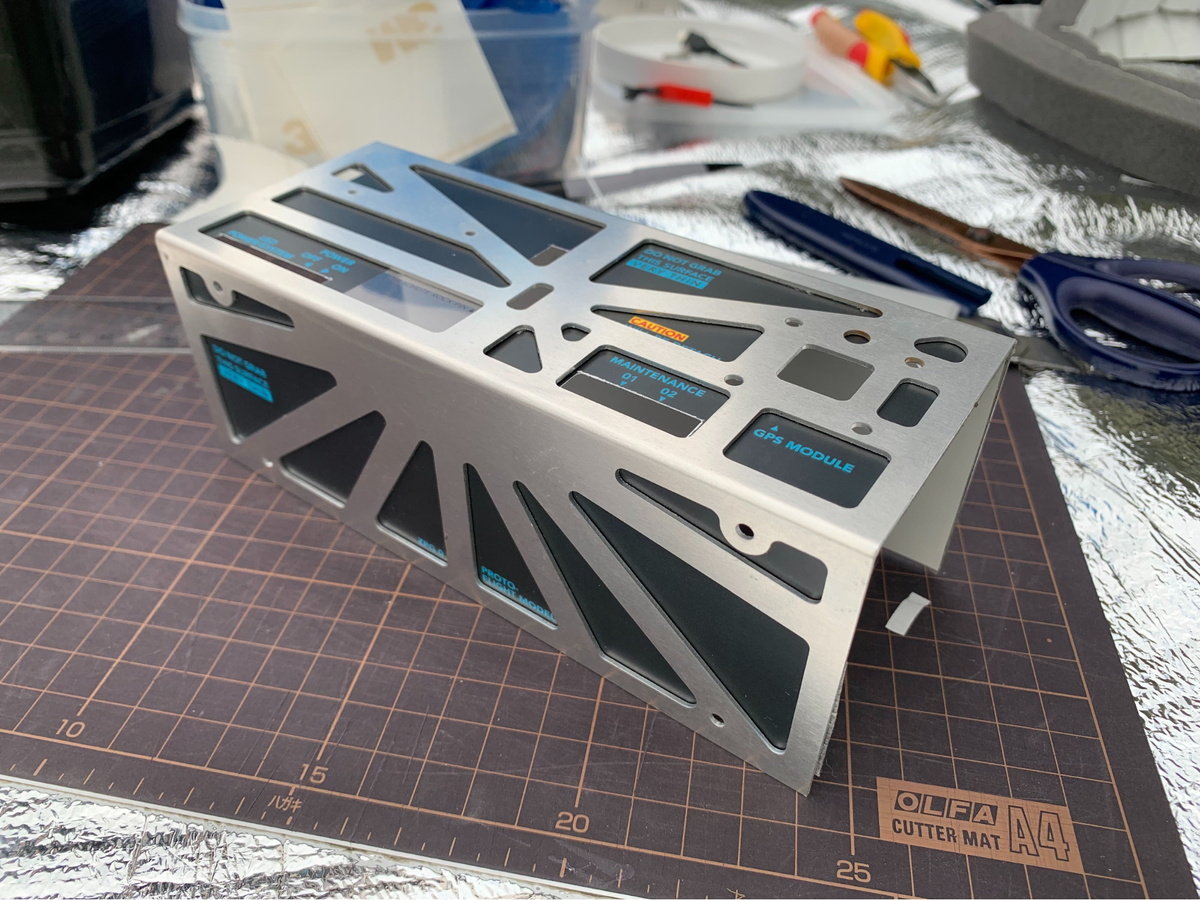
そして、フライトモデル完成!

上の黒いBOXはコンパスが入っています。最初、モーターの近くに設置していましたが、モーターの磁気ノイズがひどく正常に作動しないことがわかり外に配置しました。
デザイン性、防塵、部品とボディとの絶縁のため、内側にOHPに印刷したシートを貼りました。
黒地に青い文字で各種注意書きを書きました。パラシュート分離ピンの状態が確認できる透明な窓や、電源スイッチ、各LED等の説明を入れて操作する際にわかりやすくしています。
皆、仕事ではなく趣味でやっているローバー作成なので、遊んでみたり追求したり、デザインにこだわったりできるのがリーマンサットローバーチームの良いところです!
いざ、北海道へ行かん!
と、その前に成功祈願!

そして迎えた大会当日。いよいよです。
全国から6チームと、惜しくも書類選考に外れてしまったチームが参加していました。外れてしまったチームはロケットから打ち上がるのと同じ高さから、ドローンで落としてもらうという救済処置があるそう。
ローバーチームからは8名参加しました。今年、北海道に引っ越し、遠隔で作業していたメンバーも参加です!

台風の影響が心配でしたが晴天にめぐまれました。しかしながら、前々日の雨の影響でやや地面が水浸し。
果たしてローバーはうまく地面を走れるのでしょうか⁈

植松電機さんの50mの高さの試験塔です。
とても高く感じましたが、本番ではさらに倍の高さの100mから落下させます。
試験をたくさん繰り返してきましたが、100mの高さから落とすのは初めてなローバーチーム。自信と不安がないまぜです。

スペースプローブコンテストで乗せていただいたロケットです。
昨年までは液体酸素と固形燃料のハイブリッドでしたが、今回から固形燃料のみになったとの事。吐きそうになりながらの大変な開発だったそうで、そんなロケットに乗せてもらえるなんて嬉しすぎます。
ノーズコーンやペイロード台など全て3Dプリント製で美しい設計でした。

用意ができたらフィットチェックです。

そして重さのチェック。

1kgを20g残して合格!
とりあえずロケットへ搭載が確定してホッとしました。
軽すぎると、今度は重りで調整が必要になるそうで、ほとんど調整の必要がなくて助かる、とのことでした。
これはローバーお散歩中
ではなく試運転中です。今のところ順調な様子。

いよいよロケットで打ち上げ!
ついに打ち上げの時間が来ました。くじ引きで順番を決めましたが、なんと1番手に!
強豪が見守る中、最初の打ち上げです。
そして、空中10mほどの場所でパラシュートが切り離されました。
打ち上げ時、私達は安全な場所まで下がっていたので慌てて駆け寄ります。
ローバーは無事なようですが、クルクルと回り続けています。
コンパスのコネクターが自由落下の衝撃で外れて目標を見失ってしまったようです。
ローバーを回収後、コネクターを接続し直してアスファルトの上で試しに運転してみたところ、正常に作動。
設定した方向に向かっています。
撮った動画を検証したところ、大会前日に紐の絡まり防止のために巻いたガムテープにパラシュートのコードが引っかった模様。また、2回目の開傘衝撃で着地と判定してしまい、パラシュートが早く切り離されたようです。
そして、10mほど自由落下したため想定よりも着陸時の速度が大きく、その衝撃でコンパスのコネクターが外れてしまいました。
中も開けてみます。サーボは正常に糸を巻き取ってピンが外れ、パラシュート分離出来ていました。

悔しいので、主催の方にダメ元でドローンでの落下をお願いしたところ、快諾していただきました!
すごく嬉しい…!
調整し直し、ドローンに積み込みました。

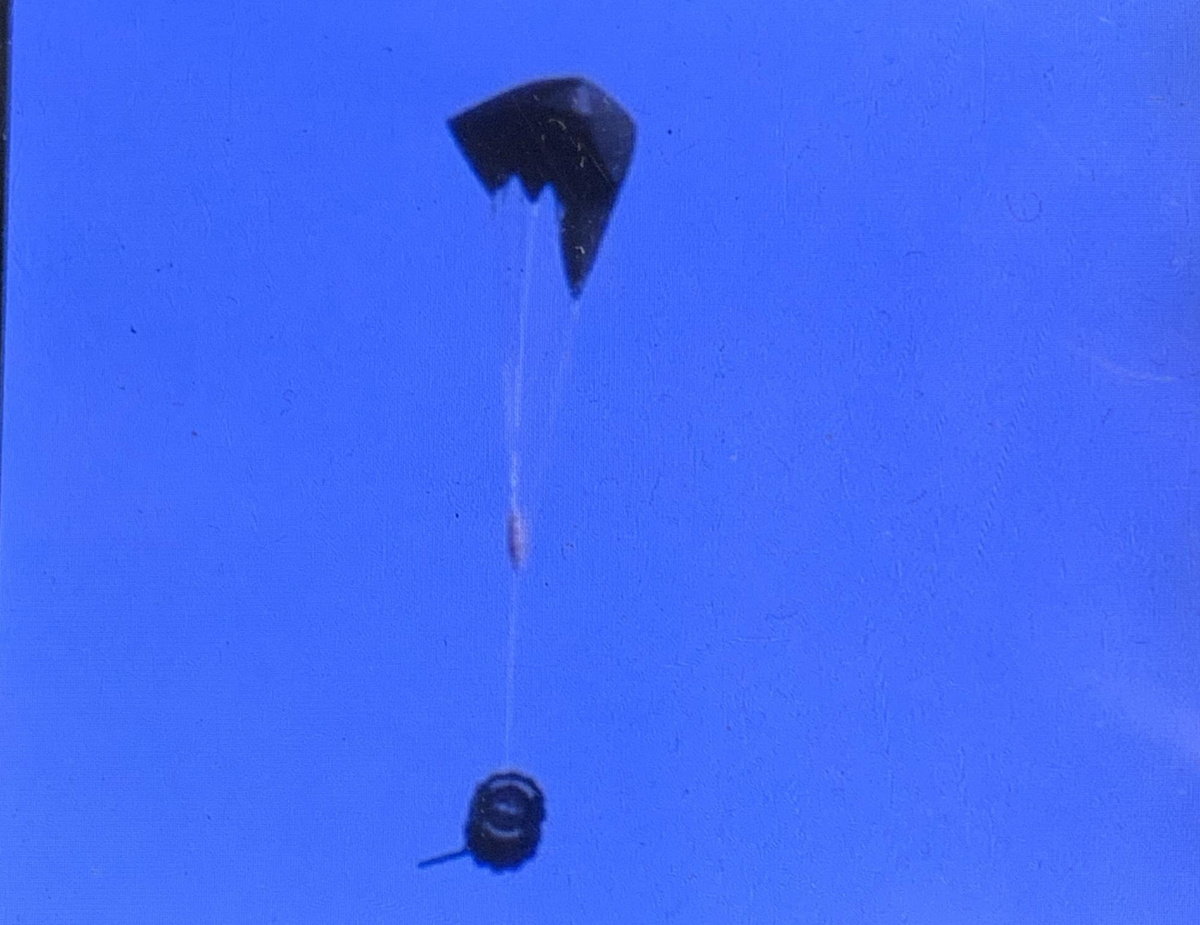
ドローンの下の筒にローバーが入っています。100mの高さまで飛んでもらって、ロケットを打ち上げたあたりで落としてもらいました。
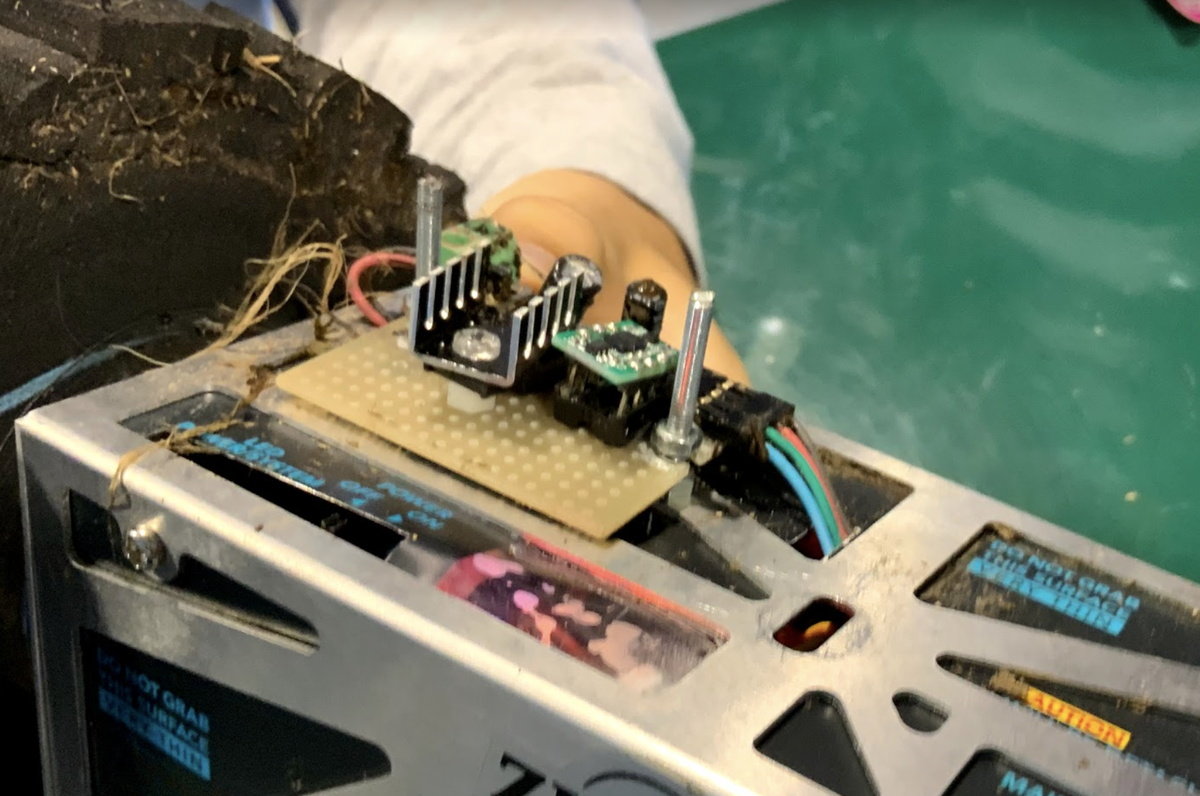
今度は無事にパラシュートが開きましたが、茂みの中へ落下しました。

ローバーの車輪に刈り取った草が巻きついてしまい、どこに持っていっても止まってしまいます。一定の方角に向かっている様子はありますが、なかなか手強い地面でした。
事後プレゼンへ参加
打ち上げ後は、お昼ご飯とともに、事後プレゼンの準備です。

当日撮った写真や、当日打ち上げたログをグラフ化して、可視化しやすくしたものを資料に使いました。
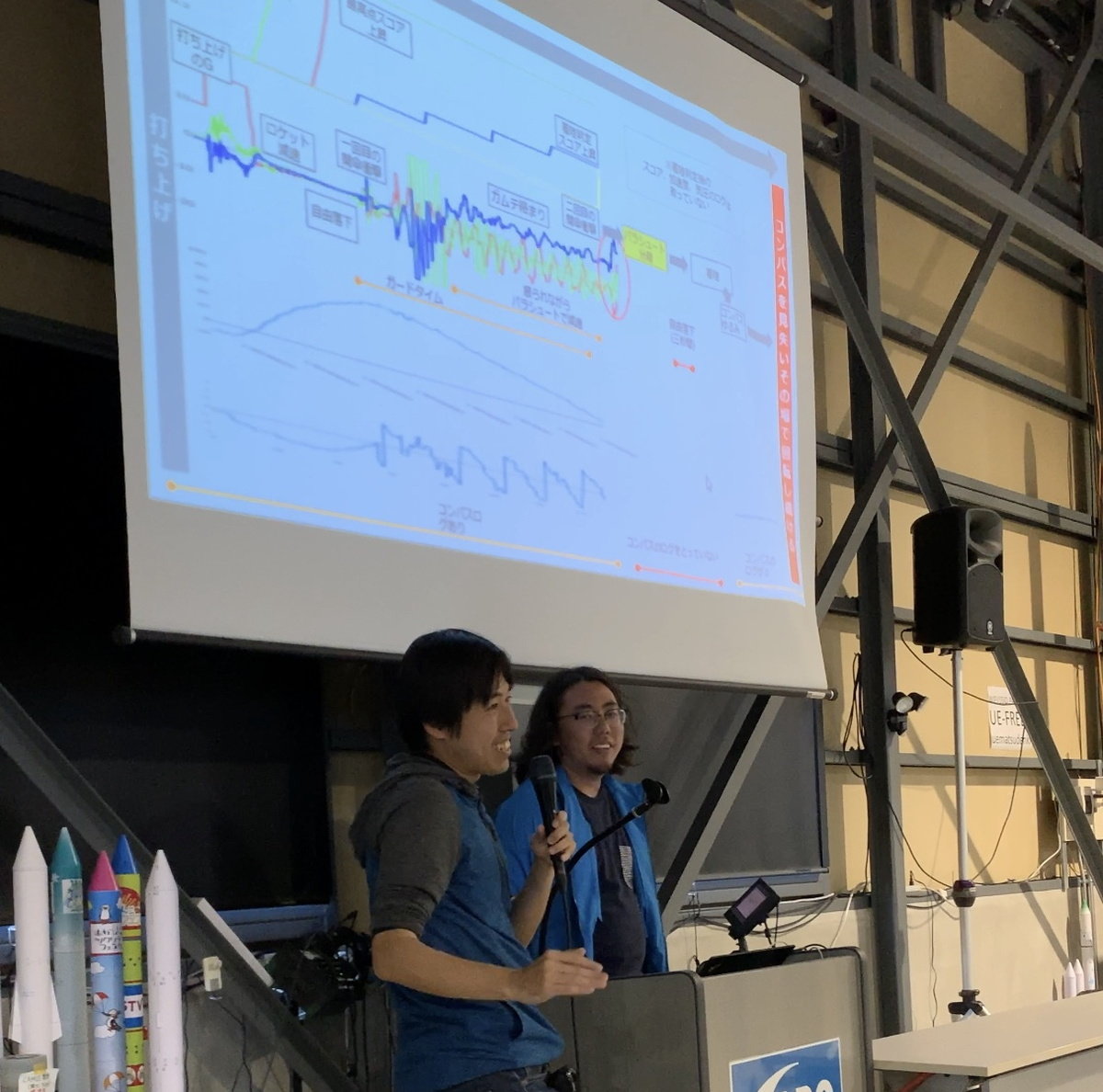
1人15分の事後プレゼンでした。
プレゼン後の質問では、自律走行や着陸判定について、外れてしまったコネクターの形状、リーマンサット・プロジェクトの事も聞かれたり、アドバイスや応援の言葉をいただいたりしました。
そして、結果発表!
我々リーマンサット・プロジェクト ローバーチームZIPANGU0号は・・・
惜しくも最優秀賞を逃したものの
優秀賞!
設計と事前準備を評価していただきました!!
悔しい顔のプロジェクトマネージャー。
最優秀賞を獲得した“チーム岩井家”は、お父さんがメインで作っていて、植松電機さんの50mの試験塔で何度も実験を繰り返していたそう。昨年もコンテストに参加されていて、気になっていたチームでした。
その後、植松電機さんのご好意で交流会!
どのチームもフレンドリーで、お互いの機体の解説をしたり、普段どんな事をしているかなどお話しできました。
「来年このパラシュートの素材使っていいですか」
「いいですよ!」
「この発想はなかった!使わせてください!」
など、ざっくばらんに意見交換できました。

結果は少し残念でしたがとてもあたたかいコンテストでやりたい事ができて満足なローバーチームでした。
植松社長、植松電機の社員の方々、本当にありがとうございました!
心より御礼申し上げます。
大会が終わった後は、みんなでジンギスカンを楽しみました。

あなたも一緒に、ローバー開発してみませんか?
リーマンサットメンバーの活動を下記にまとめました。ぜひご覧ください!
https://www.rymansat.com/join
リーマンサット・プロジェクト、ただいまクラウドファンディング中!
サラリーマンによる人工衛星を再び……悲願のミッション達成へ! – Readyfor (レディーフォー)https://readyfor.jp/projects/rymansat2
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】技術部 ローバーチーム広報
細田 佳江(ほそだ よしえ)
カポエイラと宇宙が好きな管理栄養士です。宇宙でサウージするのが夢です!