こんにちは!リーマンサットローバーチーム広報の細田佳江です。
9月は植松電機さん主催のスペースプローブコンテストが開催されました。
大会当日、北海道赤平市はあいにくの雨。机上での評価となりました。
つまり、机上審査と投下審査が別々の日程という、スペースプローブコンテストではリーマンサットローバーチームが体験したことのない状況となりました。
1日目 事前プレゼンand動作確認
当日朝、リーマンサットにはお馴染み、コワーキングスペース茅場町 Co-Edo(コエド)に7:30に集合しました。
大会場所は北海道ですので、茅場町 Co-EdoとはZoomによりオンラインで中継。
残念ながら広報細田はケガにより自宅からZoomで Co-Edoに参加となりました。
「みんなと一緒にいる気持ちで」ということなのか、みんなの様子が私から見れるようにしてくれるとともに、私の姿は茅場町 Co-Edoのモニターに映されていたようです。
大会の模様は植松電機さんがYoutubeで配信してくれました。ですので、広報細田はYouTubeで大会の様子を、オンラインでみんなの様子を同時に見ていました。
今年の参加チームは全部で5団体!初参加のチームは2か所でした。強豪ぞろいでした。おなじみチーム岩井家さんはなんと審査員側!?
今年のローバーは、今までより剛性に優れた形状をしています。
コストと強度、バランスよくできましたとは車輪作成メンバーより。
メンバーそれぞれの努力により、毎年最善の形を模索していますが、今年が1番いいように思います。
大会レギュレーションの
直径150mm以内
全長340mm以内
重量1,000g以内
に合わせて作成しました。

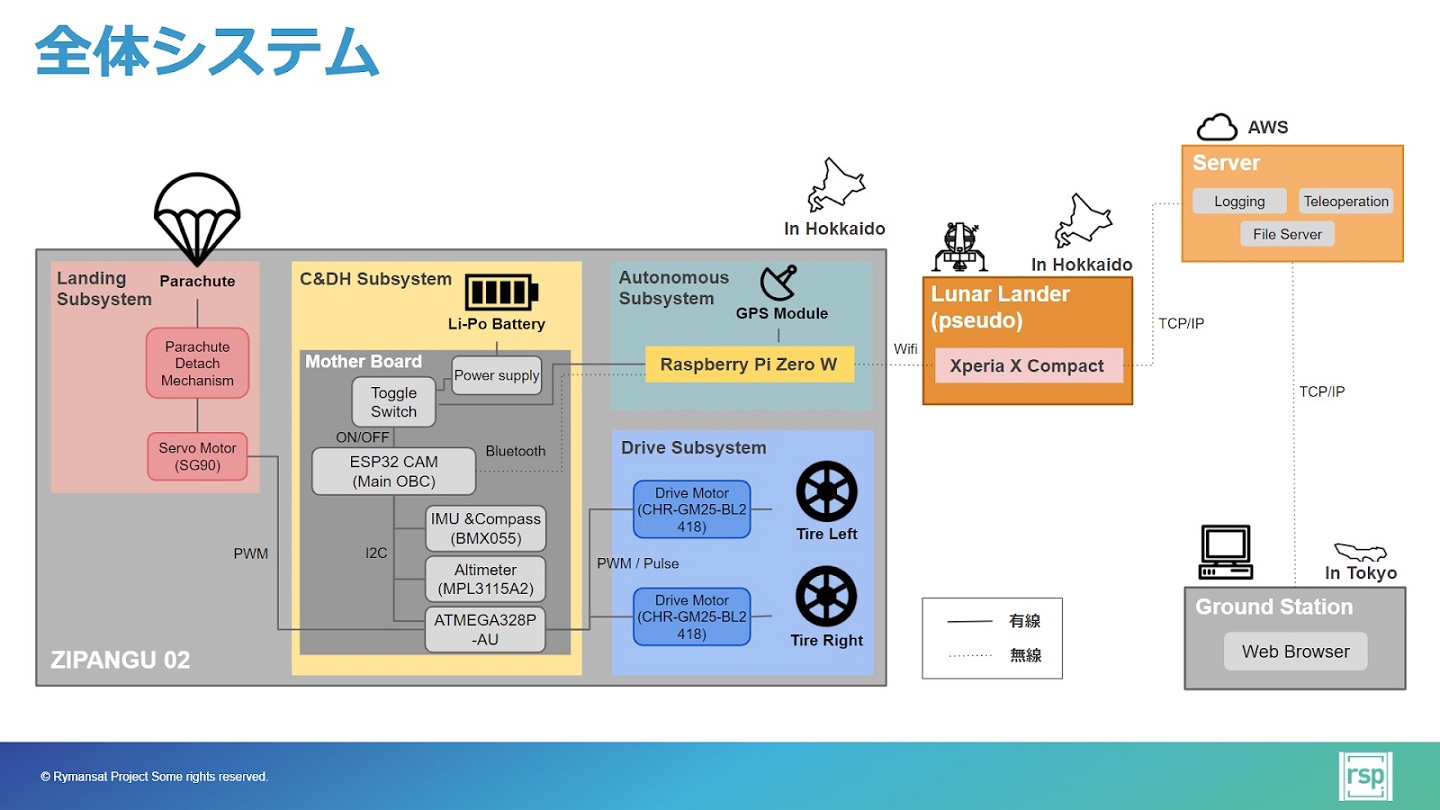
一番上についている部品はGPSです。
Bluetooth5.1を使った自律走行の実験と、GPSでの自律走行の実験と並行して行っていましたが、今回のスペースプローブコンテスト に向けたローバーはGPSでの自律走行が採用されました。
GPSのプログラムは大学生メンバーが作ってくれました。

各チームのプレゼンが進み、リーマンサットローバーチームは1番最後。
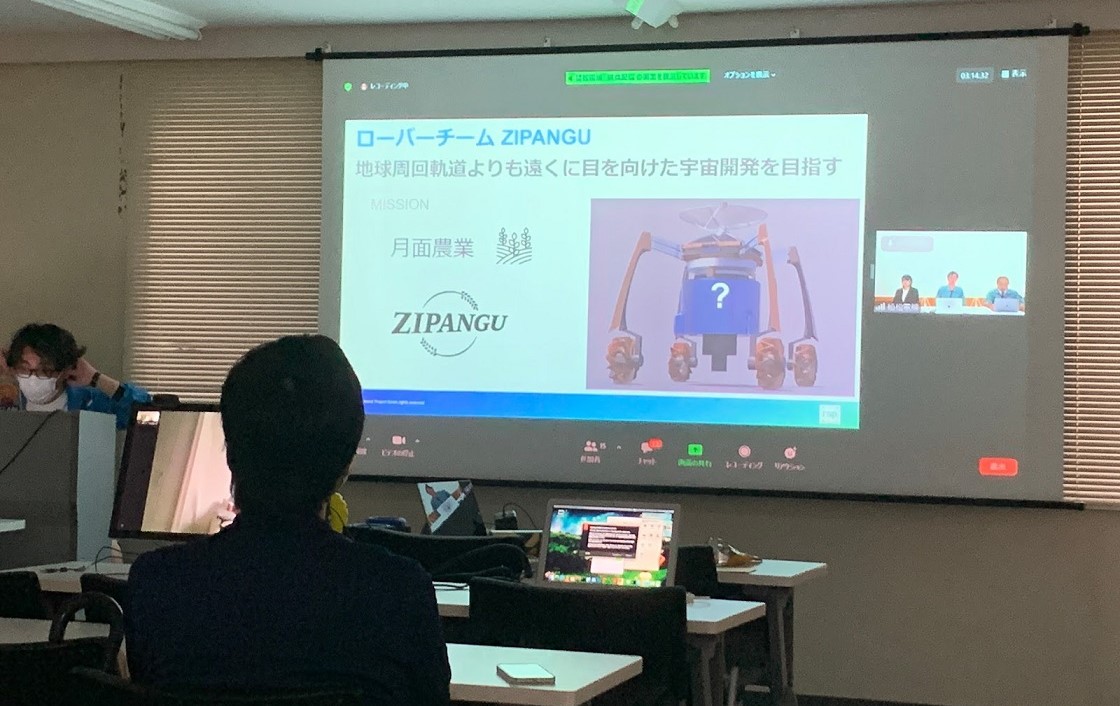
スライドに爆発図(部品の関係や組み立て順序を示した図)も入れました。

プレゼンの後は、機体が正常に作動するかの机上チェックです。

今回は、北海道にローバーと一緒にランダーに見立てたスマホを送っています。
ランダー(スマホ)のWi-Fiを使い、ローバーと通信し、AWS(クラウドサーバ)を経由して東京に画像やデータが送られてくるようにしています。
結果発表です。
なんと、机上審査については、リーマンサットローバーチーム暫定1位!

このままの調子で投下試験までいけるのでしょうか⁈
以上、ローバーチーム進捗報告でした!
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
あなたも一緒に、ローバー開発してみませんか?
リーマンサットメンバーの活動を下記にまとめました。ぜひご覧ください!
https://www.rymansat.com/join
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】技術部 ローバーチーム広報
細田 佳江(ほそだ よしえ)
カポエイラと宇宙が好きな管理栄養士です。宇宙でサウージするのが夢です!