こんにちは!
ローバーチーム広報の細田佳江です。
ローバーキックオフミーティングから2月でちょうど1年になりました。
私達ローバーチームは、地球周回軌道を飛び出し、さらには月面で田植えをするローバーの
開発を目指しています。
そのために、自分で考え走行できる「自律機能」、地面と接触し掘ったりする「掘削機能」、
電源や通信といった「バス機能」の開発をしています。
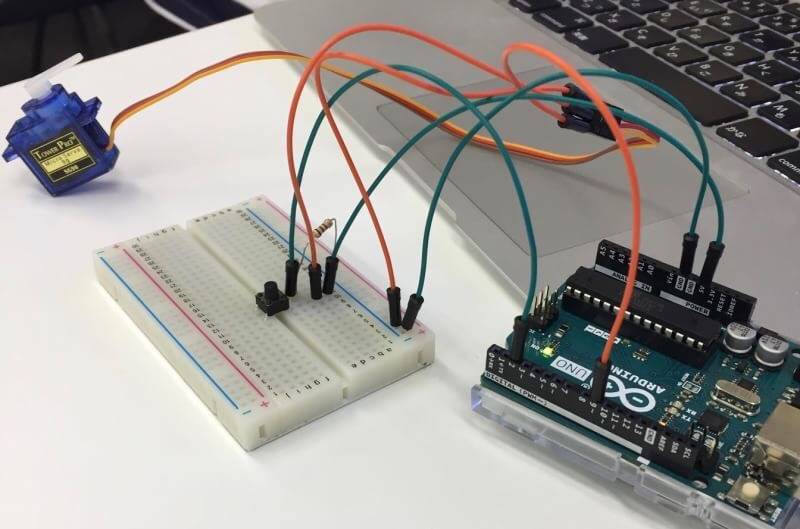
今月は地面とコンタクトするためのミッションモジュール(ミッションを実行するための装置)を作成しました。
<ローバーチーム開発進捗 vol.1 ミッションモジュール 動画>
ボタンを押すと180度回転して、離すと戻ります。
また、毎年9月に開催される植松電機さん主催のスペースプローブコンテスト(去年の様子はこちらhttps://uematsudenki.com/spc/ )に向けたcansatに搭載するローバーを作成中。
SolidWorksという3DCADを使用して中身の配置を考えました。
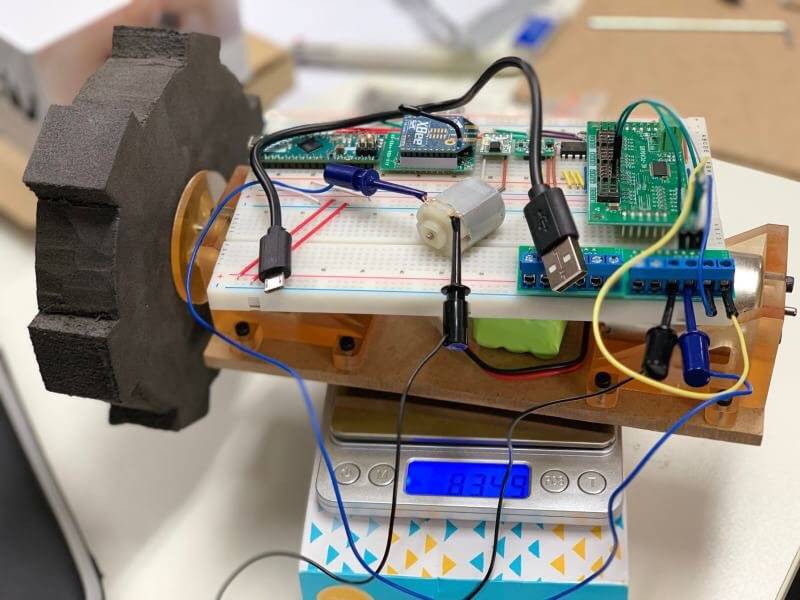
全体で1kg以内という制限があり、現状内部機器の総重量は150g。内部機器以外を残りの850gに収めるために、新規参加者の意見も参考にしながら車輪の素材やモータの選定など
構造体設計を見直しています。

3月は、スペースプローブコンテストに向けてcansat の勉強会を開催、月1回の工場ミーティングを2回にしてみる等、やる気いっぱいのメンバー一同です。
よろしくお願いします!
あなたも一緒に、ローバー開発してみませんか?
リーマンサットメンバーの活動を下記にまとめました。ぜひご覧ください!
https://www.rymansat.com/join